The Augmented Vision department has 3 papers accepted at the upcoming ICPR 2026 conference. The conference will be taking place at the International Convention Center, Lyon, France, from August 17th to 22nd. The accepted papers are:
The department Augmented Vision has 4 accepted papers at the upcoming CVPR 2026 conference taking place from June 3-7, 2026 at the Colorado Convention Center, Denver, USA.
The CVPR conference is the premier international conference in computer vision and pattern recognition.
We are happy to anounce that our work on sensor generalization has won a Best Paper Award at ICPRAM 2026. The conference was held in Marbella, Spain, from March 2nd to 4th.
René Schuster gave a talk on “Visual Continual Learning – Beyond Current Incremental Settings” during the 2nd Workshop on Human-Centered Vision and Media Technologies (HCVM) on 23.05.2025 in Tokyo. The workshop was part of the ASPIRE program (Adopting Sustainable Partnerships for Innovative Research Ecosystem) of the Japanese Science and Technology Agency.
The researchers of the Augmented Vision department have presented 4 papers at the ICPRAM 2025 conference taking place Feb 23 – 25, 2025 in Porto, Portugal.
The International Conference on Pattern Recognition Applications and Methods (ICPRAM) is a point of contact between researchers and engineers working on Pattern Recognition, both from a theoretical and application perspective.
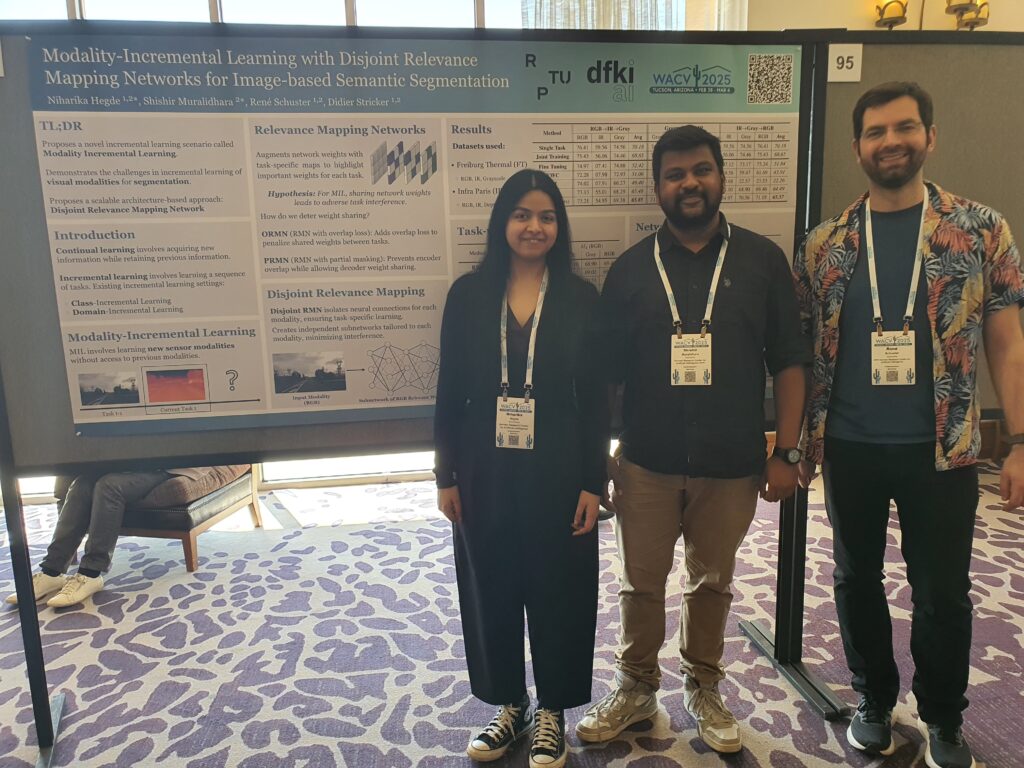
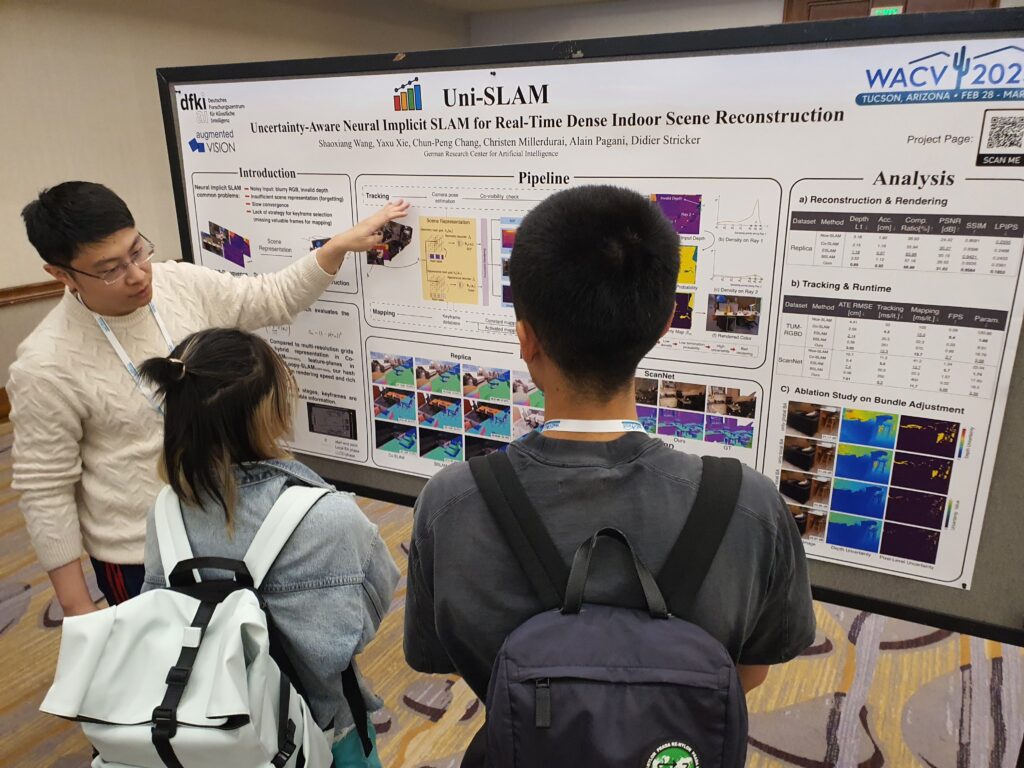
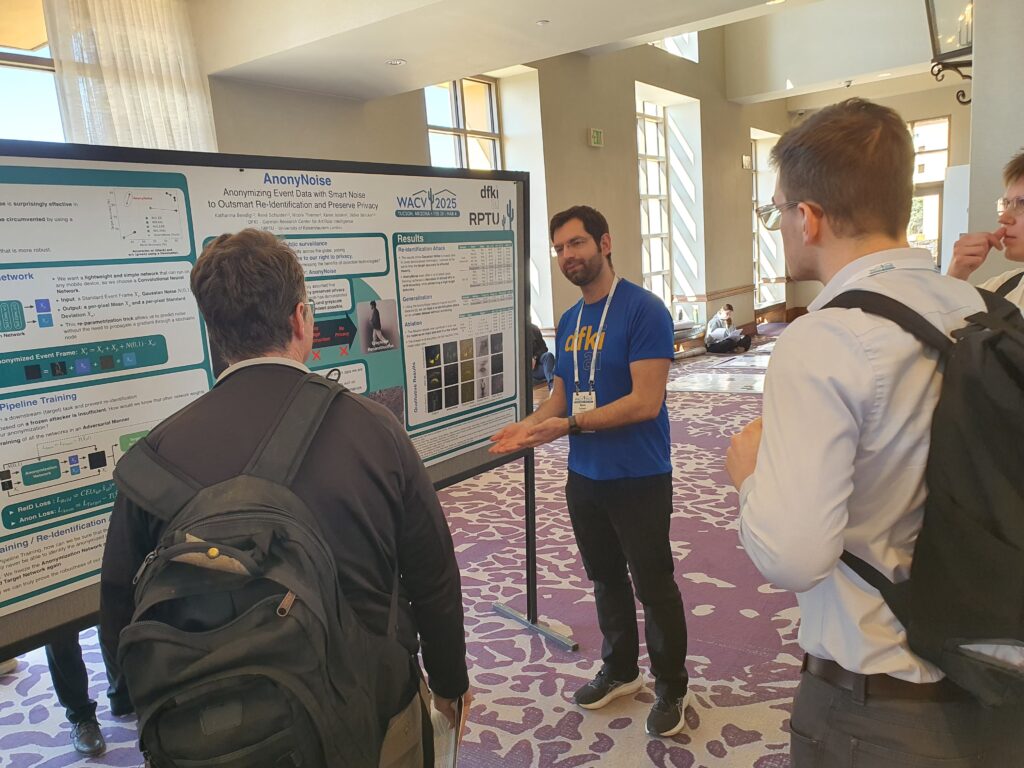
The researchers of the department Augmented Vision have presented 4 papers at WACV 2025 conference taking place Feb 28 – Mar 4, 2025 in Tucson, Arizona, USA.
The IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) one of the three major Computer Vision conferences organized by TCPAMI.
“AnonyNoise: Anonymizing Event Data with Smart Noise to Outsmart Re-Identification and Preserve Privacy”, Katharina Bendig, René Schuster, Nicole Thiemer, Karen Joisten, Didier Stricker
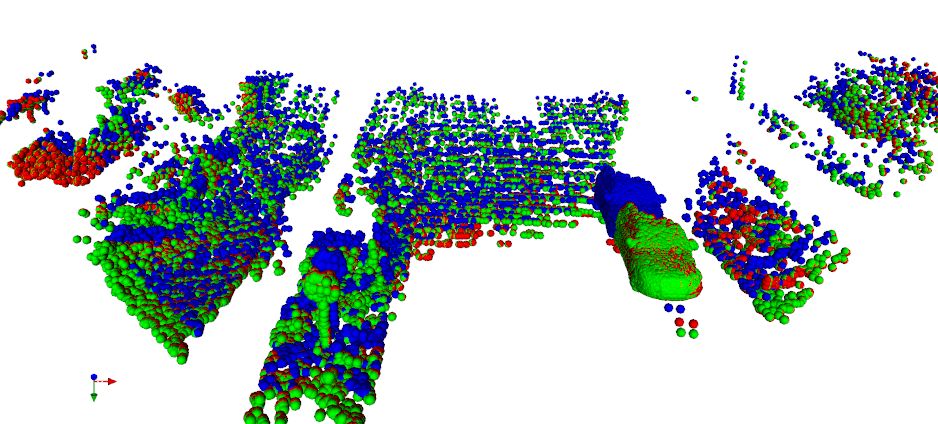
We are proud to announce that our paper “RMS-FlowNet++: Efficient and Robust Multi-scale Scene Flow Estimation for Large-Scale Point Clouds” by Ramy Battrawy, René Schuster, and Didier Stricker has been published in the International Journal of Computer Vision (IJCV). The online version of the paper can be found here a preprint is available here. The paper extends our previous work on efficient scene flow estimation in dense point clouds that has been published at ICRA 2022.
René Schuster and Prof. Dr. Didier Stricker moments after the oral defense.
On March 18th, 2022, René Schuster successfully defended his dissertation entitled “Data-driven and Sparse-to-Dense Concepts in Scene Flow Estimation for Automotive Applications”. The reviewers were Prof. Dr. Didier Stricker (Technical University of Kaiserslautern) and Prof. Dr. Andrés Bruhn (University of Stuttgart). Mr. Schuster received his doctorate from the Department of Computer Science at the Technical University of Kaiserslautern.
In his thesis, Mr. Schuster worked on three-dimensional motion estimation of the dynamic environment of vehicles. The focus was on machine learning methods, and the interpolation of individual estimates into a dense motion field. A particular challenge was the scarcity of annotated data for this problem and use case.
René Schuster received an M. Sc. in computational engineering from Darmstadt University of Technology in 2017. He then moved to DFKI to join the augmented reality group of Prof. Stricker. Much of his research was done in collaborative projects with BMW.
René Schuster at the celebration of his newly earned title.
We are happy to announce that our project DECODE has been accepted for the Nvidia Academic Hardware Grant. Nvidia will support our research in the field of human motion estimation and semantic reconstruction by donating a Nvidia A100 GPU for data centers. We will use the new hardware to accelerate our experiments for continual learning.
We are happy to announce that our paper “Multi-scale Iterative Residuals for Fast and Scalable Stereo Matching” has been accepted to the CSCS 2021!
The Computer Science in Cars Symposium (CSCS) is ACM’s flagship event in the field of Car IT. The goal is to bring together scientists, engineers, business representatives, and anyone who shares a passion for solving the myriad of complex problems in vehicle technology and their application to automation, driver and vehicle safety, and driving system safety.
In our work, we place stereo matching in a coarse-to-fine estimation framework to improve runtime and memory requirements while maintaining accuracy. This multiscale framework is tested for two state-of-the-art stereo networks and shows significant improvements in runtime, computational complexity, and memory requirements.
KI zur Erkennung menschlicher Bewegungen und des Umfeldes
Adaptive Methoden die kontinuierlich dazu lernen (Lebenslanges Lernen), bilden eine zentrale Herausforderung zur Entwicklung von robusten, realitätsnahen KI-Anwendungen. Neben der reichen Historie auf dem Gebiet des allgemeinen kontinuierlichen Lernens („Continual Learning“) hat auch das Themenfeld von kontinuierlichem Lernen für Machinelles Sehen unter Realbedingungen jüngst an Interesse gewonnen.
Ziel des Projektes DECODE ist die Erforschung von kontinuierlich adaptierfähigen Modellen zur Rekonstruktion und dem Verständnis von menschlicher Bewegung und des Umfeldes in anwendungsbezogenen Umgebungen. Dazu sollen mobile, visuelle und inertiale Sensoren (Beschleunigungs- und Drehratensensoren) verwendet werden. Für diese verschiedenen Typen an Sensoren und Daten sollen unterschiedliche Ansätze aus dem Bereich des Continual Learnings erforscht und entwickelt werden um einen problemlosen Transfer von Laborbedingungen zu alltäglichen, realistischen Szenarien zu gewährleisten. Dabei konzentrieren sich die Arbeiten auf die Verbesserung in den Bereichen der semantischen Segmentierung von Bildern und Videos, der Schätzung von Kinematik und Pose des menschlichen Körpers sowie der Repräsentation von Bewegungen und deren Kontext. Das Feld potentieller Anwendungsgebiete für die in DECODE entwickelten Methoden ist weitreichend und umfasst eine detaillierte ergonomische Analyse von Mensch-Maschine Interaktionen zum Beispiel am Arbeitsplatz, in Fabriken, oder in Fahrzeugen.
We are proud to announce that the Augmented Vision group will present three papers in the upcoming ICPR 2020 conference which will take place from January 10th till 15th, 2021. The International Conference on Pattern Recognition (ICPR) is the premier world conference in Pattern Recognition. It covers both theoretical issues and applications of the discipline. The 25th event in this series is organized as an online virtual conference with more than 1800 participants expected.
The Winter Conference on Applications of Computer Vision (WACV 2021) is IEEE’s and the PAMI-TC’s premier meeting on applications of computer vision. With its high quality and low cost, it provides an exceptional value for students, academics and industry researchers. In 2021, the conference is organized as a virtual online event from January 5th till 9th, 2021.
Abstract: This paper demonstrates a system capable of combining a sparse, indirect, monocular visual SLAM, with both offline and real-time Multi-View Stereo (MVS) reconstruction algorithms. This combination overcomes many obstacles encountered by autonomous vehicles or robots employed in agricultural environments, such as overly repetitive patterns, need for very detailed reconstructions, and abrupt movements caused by uneven roads. Furthermore, the use of a monocular SLAM makes our system much easier to integrate with an existing device, as we do not rely on a LiDAR (which is expensive and power consuming), or stereo camera (whose calibration is sensitive to external perturbation e.g. camera being displaced). To the best of our knowledge, this paper presents the first evaluation results for monocular SLAM, and our work further explores unsupervised depth estimation on this specific application scenario by simulating RGB-D SLAM to tackle the scale ambiguity, and shows our approach produces econstructions that are helpful to various agricultural tasks. Moreover, we highlight that our experiments provide meaningful insight to improve monocular SLAM systems under agricultural settings.
Abstract: Images recorded during the lifetime of computer vision based systems undergo a wide range of illumination and environmental conditions affecting the reliability of previously trained machine learning models. Image normalization is hence a valuable preprocessing component to enhance the models’ robustness. To this end, we introduce a new strategy for the cost function formulation of encoder-decoder networks to average out all the unimportant information in the input images (e.g. environmental features and illumination changes) to focus on the reconstruction of the salient features (e.g. class instances). Our method exploits the availability of identical sceneries under different illumination and environmental conditions for which we formulate a partially impossible reconstruction target: the input image will not convey enough information to reconstruct the target in its entirety. Its applicability is assessed on three publicly available datasets. We combine the triplet loss as a regularizer in the latent space representation and a nearest neighbour search to improve the generalization to unseen illuminations and class instances. The importance of the aforementioned post-processing is highlighted on an automotive application. To this end, we release a synthetic dataset of sceneries from three different passenger compartments where each scenery is rendered under ten different illumination and environmental conditions: https://sviro.kl.dfki.de
The International Journal of Computer Vision (IJCV) is considered one of the top journals in Computer Vision. It details the science and engineering of this rapidly growing field. Regular articles present major technical advances of broad general interest. Survey articles offer critical reviews of the state of the art and/or tutorial presentations of pertinent topics.