The Augmented Vision department has 3 papers accepted at the upcoming ICPR 2026 conference. The conference will be taking place at the International Convention Center, Lyon, France, from August 17th to 22nd. The accepted papers are:
Several researchers of the Augmented Vision department have recently received prestigious reviewer awards from the leading computer vision and machine learning conferences.
4 AV members (Dr. Jason Rambach, Dr. Alain Pagani, Shaoxiang Wang and Yaxu Xie) have received the Outstanding Reviewer of the CVPR 2026 conference, given to the top 6.1% out of 25.149 reviewers. The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) is the premier annual computer vision event. CVPR 2026 will be held in Denver, CO, from June 3rd to 7th, 2026.
The complete list of outstanding reviewers for this year can be accessed HERE
In addition, Shashank Mishra has received the Gold Reviewer award of the ICML conference, given to the top 25% reviewers. The International Conference on Machine Learning (ICML) is the premier Machine Learning conference world-wide. ICML 2026 will be held Seoul, South Korea, from July 6th to 11th, 2026.
The workshop included presentations on the current state of 6 EU Horizon projects on construction robotics (Beeyonders, RobetArme, ShieldBoT, Target-X, XSCAVE, DISCOVER), followed by a round table and interactive session with the audience on the challenges and opportunities of robotic projects in construction.
The department Augmented Vision has 4 accepted papers at the upcoming CVPR 2026 conference taking place from June 3-7, 2026 at the Colorado Convention Center, Denver, USA.
The CVPR conference is the premier international conference in computer vision and pattern recognition.
Elgoibar (Spain), 20 November 2025 – The ShieldBot project – Next-Generation Robotics for Sustainable and Efficient Thermal Shielding of Buildings – officially launched with a kick-off meeting on 4-5 of November 2025 at the premises of IDEKO Research Centre, the project coordinator, in Elgoibar (Basque Country), Spain.
Funded by the Horizon Europe programme with EUR 4 million and set to run over three years, ShieldBot brings together 11 partners from six European countries. The consortium ambitions to revolutionise how buildings are constructed, renovated, and maintained through the use of advanced, sustainable robotics.
In response to Europe’s growing demand for energy-efficient and sustainable buildings, ShieldBot aims to bridge the gap between traditional construction methods and modern sustainability standards. The project will develop and validate a new generation of robotic systems specifically designed for the construction, renovation, and maintenance of buildings, enabling greater efficiency, safety, and environmental performance.
At its core, ShieldBot focuses on three key robotic platforms: Façade-ShieldBot, which installs thermal shielding on building façades to improve insulation and reduce energy consumption; Inner-ShieldBot, designed for internal construction work to enhance the thermal performance of walls and ceilings, and Inspection-ShieldBot, equipped with advanced sensors to assess exteriors, identify structural or insulation needs, and ensure long-term building integrity.
These robotic systems are supported by Digi-Shield, a digital twin platform that aggregates and analyses data from on-site operations, enabling real-time decision-making and precise project planning. Moreover, the use of Eco-Shield materials, innovative, eco-friendly insulation solutions, will further minimise the carbon footprint of construction activities.
ShieldBot’s vision extends beyond automation. A strong emphasis is placed on human–robot collaboration, ensuring that technology complements human expertise rather than replacing it. This synergy will enhance workforce safety, productivity, and efficiency, while supporting the transition towards greener and smarter construction processes.
The project’s activities will be structured across three main research areas: disruptive robotic solutions for the construction industry, advanced robot functionalities for construction and renovation works, and advanced construction site technologies. In the context of these research areas, three demonstration cases will be carried out: interior wall and ceiling construction in office buildings, inspection and maintenance of exterior building façades, and exterior façade insulation of multi-family dwellings.
By combining cutting-edge robotics, artificial intelligence, and sustainable materials, ShieldBot will set a new benchmark for efficiency and environmental responsibility in construction. The project’s outcomes are expected to contribute significantly to the European Green Deal’s objectives and the broader digital and green transformation of the built environment.
Sai Srinivas Jeevanandam represented DFKI Augmented Vision at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), held in Hangzhou, China from October 19 to 25 and presented the paper:
The Augmented Vision department presented 3 publications at the 33rd European Signal Processing Conference (EUSIPCO 2025), held in Isola delle Femmine – Palermo – Italy, on September 8-12, 2025.
SPADE stands for Secure, Privacy-Aware Naturalistic Driving Data for Future Mobility Insights from Structured and Unstructured Environments. The workshop had a full-day schedule consisting of invited talks and submitted papers, all with thematic relation to the BERTHA EU Horizon Project.
The Augmented Vision department had a strong presence at the IEEE Computer Vision and Pattern Recognition CVPR 2025 conference with contributions to the main conference, workshops, and challenges:
Dr. Jason Rambach, was honored as an Outstanding Reviewer of the CVPR 2025 conference, selected among the top 5% of the 9872 total reviewers.
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) is the premier annual computer vision event. CVPR 2025 will be held in Nashville, TN, from June 11th to June 15th 2025.
The complete list of outstanding reviewers for this year can be accessed HERE.
The consortium of the HumanTech project, under the coordination of DFKI Augmented Vision – Dr. Jason Rambach, had its final in-person General Assembly meeting in Madrid, Spain on the 30-31st January 2025. The meeting was hosted in the premises of the project partner ACCIONA. All project partners had an opportunity to experience live demonstrations of the HumanTech technologies bringing AI and Robots to construction sites, such as intention-activated exoskeletons for construction workers and collaborative brick-laying robots.
The HumanTech project is ending in May 2025 with several success stories such as:
5 innovative pilot deployments of HumanTech technologies.
15+ scientific publications including top computer vision and robotics journals and conferences.
5 awards for DFKI in International challenges in object pose estimation and Scan-to-BIM.
Building a vibrant community for AI in Construction, the Tech4Construction cluster.
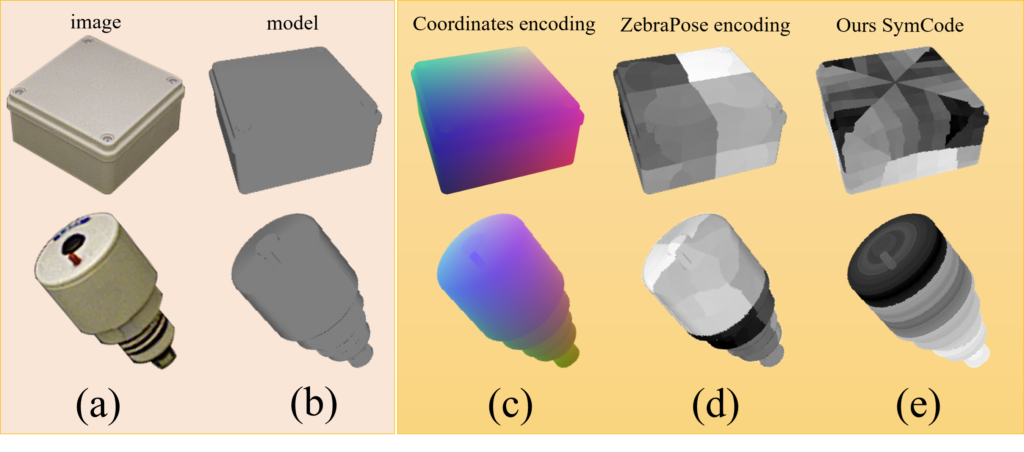
Our article “Resolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation” was published in the prestigious Transactions on Image Processing (TIP) Journal. The work is a collaboration of DFKI with Zhejiang University. The article is openly accessible at: https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10906413
Yongliang Lin, Yongzhi Su, Sandeep Inuganti, Yan Di, Naeem Ajilforoushan, Hanqing Yang, Yu Zhang, Jason Rambach. “Resolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation” IEEE Transaction on Image Processing (2025).
Dr. Jason Rambach, gave a talk on “Building Virtual Worlds with 3D Sensing and AI” at the NEM Summit 2024 in Brussels on the 23.10.2024. The presentation was part of the AI for Virtual Worlds session organized by Future Artificial Intelligence Research (FAIR). The presentation with results from the Project HumanTech and various XR projects based on object pose estimation technology from DFKI, was followed by an exciting panel discussion.
The HumanTech project, under the coordination of DFKI Augmented Vision – Dr. Jason Rambach, has reached another key milestone with a highly productive General Assembly Meeting held from 5 to 6 September 2024 at the Technological University of the Shannon (TUS), Athlone Campus, Ireland. As the project is on its final path toward completion next year, this meeting marked an important step in aligning strategies and objectives for the remaining phases.
The overall status of the project shows that everything is progressing as planned, with the pilots well on track and providing a solid foundation for both achieving the current project goals and supporting future research and development initiatives. Additionally, participants enjoyed a guided tour and live demonstration at TUS’s state-of-the-art robotics department, showcasing cutting-edge technology that will play a crucial role in advancing AI applications in the construction industry.
Dr. Jason Rambach, coordinator of the EU Horizon Project HumanTech , participated in the “Digital Twins for Sustainable Construction” session at the Sustainable Places conference in Luxembourg (23.9-27.9) organized by projects of the Tech4Construction cluster.
Dr. Rambach presented results from the Project HumanTech, focusing on the automated Scan-to-BIM problem. In addition, he was a panel member for the ensuing discussion together with coordinator and members of other ongoing projects in construction and building management such as RobetArme, Beeyonders, InCube and Reincarnate.
On the 18.6, the team presented their solution and results as part of the workshop program. Scan-to-BIM solutions are of great importance for the construction community as they automate the generation of as-built models of buildings from 3D scans, and can be used for quality monitoring, robotic task planning and XR visualization, among other applications.
We are excited to share that the Augmented Vision group got two papers accepted at the IEEE conference on Automatic Face and Gesture Recognition (FG 2024), the premier international forum for research in image and video-based face, gesture, and body movement recognition. FG 2024 took place in Istanbul, Turkey, from the 27th to 31st of May.
Dr. Jason Rambach, coordinator of the EU Horizon Project HumanTech , organized the 2nd workshop on “AI and Robotics in Construction” at the European Robotics Forum 2024 in Rimini, Italy (13.3-15.3) in cooperation with the construction Robotics projects Beeyonders and RobetArme and the Tech4Construction cluster.
The workshop included presentations on the current state of the 3 organizing projects (HumanTech, Beeyonders and RobetArme) from their coordinators, followed by technical presentations from project partners (KU Leuven, SINTEF, ITAINNOVA) on topics such as robotic vision and navigation and human-robot interaction for construction, and closing with a user evaluation insights presentation by the German Federal Institute for Occupational Safety and Health (BAUA). The presentations were followed by a very interesting round table discussion on the challenges of robotic projects in construction.
We are proud to announce that the researchers of the department Augmented Vision will present 6 papers at the upcoming CVPR conference taking place Mon Jun 17th through Fri Jun 21st, 2024 at the Seattle Convention Center, Seattle, USA.
The CVPR conference is the premier international conference in computer vision and pattern recognition.
HiPose: Hierarchical Binary Surface Encoding and Correspondence Pruning for RGB-D 6DoF Object Pose Estimation Yongliang Lin, Yongzhi Su, Praveen Nathan, Sandeep Inuganti, Yan Di, Martin Sundermeyer, Fabian Manhardt, Didier Stricker, Jason Rambach, Yu Zhang
SG-PGM: Partial Graph Matching Network with Semantic Geometric Fusion for 3D Scene Graph Alignment and Its Downstream Tasks Yaxu Xie, Alain Pagani, Didier Stricker
CAD-SIGNet: CAD Language Inference from Point Clouds using Layer-wise Sketch Instance Guided Attention Mohammad Sadil Khan, Elona Dupont, Sk Aziz Ali, Kseniya Cherenkova, Anis Kacem, Djamila Aouada
EventEgo3D: 3D Human Motion Capture from Egocentric Event Streams Christen Millerdurai, Hiroyasu Akada, Jian Wang, Diogo Luvizon, Christian Theobalt, Vladislav Golyanik
Congratulations to the authors for this great achievement!