
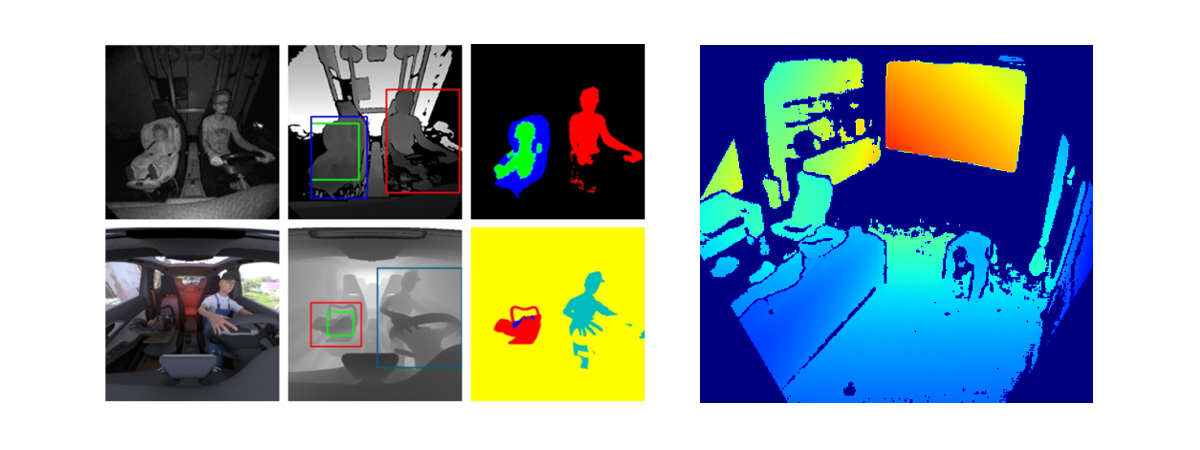
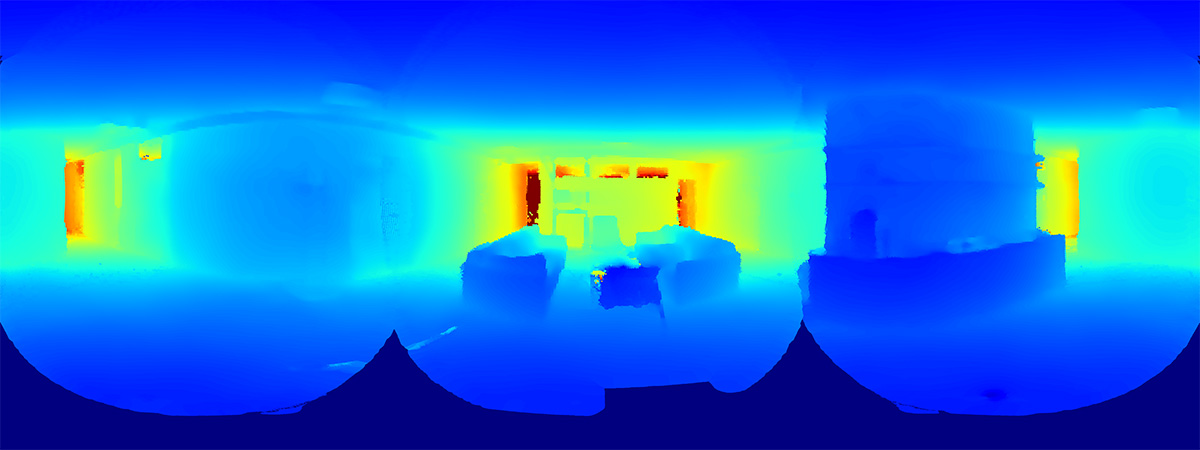
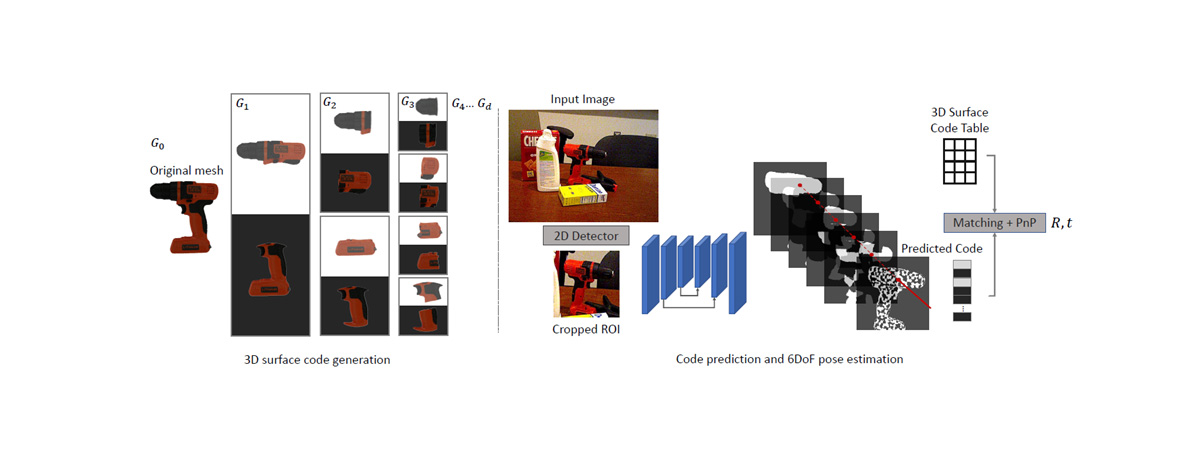
Team SSMP (Spatial Sensing and Machine Perception), led by Dr. Jason Rambach, focuses on the use of diverse 3D/2D sensing modalities (RGB/Stereo/ToF cameras, Radar, Lidar) to address challenging scene perception problems using Machine Learning / Deep Learning and traditional geometric Computer Vision. Such problems include Semantic Scene Reconstruction, 6DoF Object Pose Estimation, Unsupervised Anomaly Detection, SLAM, Scan2CAD. Indicative application areas are Smart building sensing, AI in construction, Autonomous Driving, Industrial Robotics and Augmented Reality.