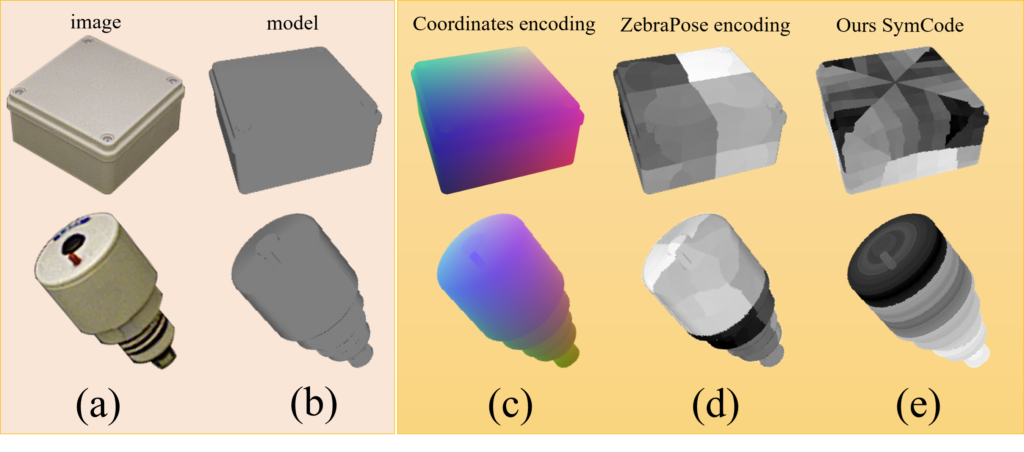
Our article “Resolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation” was published in the prestigious Transactions on Image Processing (TIP) Journal. The work is a collaboration of DFKI with Zhejiang University. The article is openly accessible at: https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10906413
Yongliang Lin, Yongzhi Su, Sandeep Inuganti, Yan Di, Naeem Ajilforoushan, Hanqing Yang, Yu Zhang, Jason Rambach. “Resolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation” IEEE Transaction on Image Processing (2025).
Three EU projects coordinated by the AV department have been presented in a meeting of the Virtual and Augmented Reality Industrial Coalition, hosted by the European Commission in Brussels on February 11th and 12th 2025. The meeting brought together over 110 attendees from more than 80 private and public organisations for discussions about the creation of a Private Public Partnership on Virtual Worlds.
The Augmented Vision department presented its work on extended reality (XR) in the projects CORTEX² (Coordinator: Alain Pagani), LUMINOUS (Coordinator: Zeshan Afzal) and SHARESPACE (Coordinator: Didier Stricker), and participated intensively to the discussions about the Strategic Research and Innovation Agenda (SRIA) of the future Virtual Worlds Partnership.
The topics covered immersion & visualization, intuitive real-time user interaction, standardisation & interoperability, digital twins and XR use cases such as logistics & industry, healthcare, culture media & arts or education.
The department Augmented Vision will continue to represent DFKI in the future partnership on Virtual Worlds with eXtended Reality as key enabling technology.
More information: https://digital-strategy.ec.europa.eu/en/news/virtual-and-augmented-reality-industrial-coalition-remains-committed-solving-real-world-problems
On December 19th, 2024, Jilliam Díaz Barros successfully defended her doctoral thesis entitled ‘Optimization and Generative Models for Face Analysis’. The PhD thesis was carried out in the Augmented Vision department at DFKI, led by Prof. Dr. Didier Stricker, as part of the Computer Science department at RPTU.
The PhD examination commission consisted of Prof. Dr. Didier Stricker (RPTU) and Prof. Dr. Luís Gonzaga Mendes Magalhães (University of Minho) and was chaired by Prof. Dr. Annette Bieniusa (RPTU).
In her thesis, Jilliam Díaz investigated the modelling of the rigid and non-rigid motions of the head, targeting existing challenges in assistance tools and assistive technologies. The PhD thesis focused on four main areas of contributions: head pose estimation, performance-driven facial animation, facial landmark detection and tracking, and face and upper body image synthesis.
Jilliam Díaz received her Bachelor degree in Electronics Engineering from Universidad del Norte, Colombia and her M.Sc. in Computer Science and Electronics from the Université de Bourgogne, France. Besides being part of the Augmented Vision department, Ms. Díaz Barros has been working as software engineer at ANNA Healthcare Saarland UG.
A great big congratulations on receiving your PhD and we wish you all the best for the future!
The workshop “Excellence in AI and Edge Computing” held on Monday, 20 January, was dedicated to exploring the frontiers of the AI and edge computing synergy, focusing on the development of scalable and robust AI systems. It opened with a keynote by Dr. Alireza Dehghani from the Irish National Centre for Applied AI CeADAR, followed by the presentation of 15 scientific papers and a demo session. The workshop closed with a matchmaking session about “Industrial investment priorities for successful AI at the Edge in Europe”.
The workshop “Charting the Future of Edge AI: Functional and Non-Functional Requirements in the Age of Generative AI” held on Tuesday, 21 January, was organized by Ovidiu Vermesan (SINTEF) and Alain Pagani (DFKI). It provided a comprehensive platform for stakeholders to exchange ideas, share experiences, and collaborate on advancing edge AI technologies, with a special focus on addressing functional and non-functional requirements defined based on system engineering principles. The three sessions covered “Requirements in the Generative AI Era”, “Technology developments” and “Application developments” with presentations, followed by a panel discussion on Edge AI Future Trends.
Our paper “G3FA: Geometry-guided GAN for Face Animation” was presented at the British Machine Vision Conference (BMVC) 2024 by Alireza Javanmardi from the Augmented Vision Department DFKI!
The British Machine Vision Conference (BMVC) is one of the major international conferences on computer vision and related areas and is organised by the British Machine Vision Association (BMVA). This year it was held in Glasgow from November 25th to 28th.
Our work presents a method for real-time face re-enactment from one single source image and addresses a key limitation of GAN-based face animation: geometric consistency.
G3FA enhances realism, especially in challenging head poses, by:
Utilizing implicit 3D supervision through inverse rendering to extract depth and normal maps from 2D images, guiding the generator towards greater accuracy.
Employing an ensemble of discriminators to incorporate the 3D properties, improving the generator’s understanding of human head structure.
Leveraging face volume rendering with orthogonal ray sampling and volume rendering for high-quality image synthesis.
Over the three days, more than 50 presenters took part in 12 keynotes and parallel sessions, addressing more than 20 topics, where participants discussed how Edge AI is redefining the future of technological applications and systems.
dAIEDGE Partners contributed to the EEAI programme with presentations that offered a practical and innovative view of Edge AI in action, highlighting its transformative potential in sectors such as sustainability, energy and security:
FPGA Acceleration for SAR Imagery-Based Sea Ice Mapping: This presentation, by Rashed Al Koutayni (DFKI), addressed the use of FPGA accelerators to improve the speed and accuracy of sea ice mapping using synthetic aperture radar (SAR) imagery.
Functional and Non-Functional Requirements in Edge AI Systems: Ovidiu Vermesan (SINTEF, Norway) and Alain Pagani (DFKI, Germany) discussed the challenges associated with functional and non-functional requirements in Edge AI systems, addressing both operational needs and ethical and legal constraints.
Legal Requirements for Trustworthy Edge AI: Lydia Belkadi from KU Leuven addressed the regulations needed to ensure trustworthy edge AI solutions
The event allowed participants not only to learn from leading experts, but also to network and connect with the best in the industry, strengthening a community of experts and practitioners who are driving innovation in Edge AI.
The researchers of the Augmented Vision department presented their latest research activities in the field of eXtended Reality at the EuroXR conference in Athens, from November 27th to 29th, 2024.
The European Association for eXtended Reality (EuroXR) Conference is the ultimate gathering for Virtual Reality (VR), Augmented Reality (AR), and Mixed Reality (MR). This year, the conference was co-organized by the Institute of Communication and Computer System (ICCS) of the National Technical University of Athens (NTUA).
This year, a joint event on Next Generation XR was co-organized by six European Projects, among them CORTEX2, LUMINOUS and SHARESPACE, all coordinated by the Augmented Vision department at DFKI.
Alain Pagani presented the recent work on cooperative telepresence in the project CORTEX2
Zeshan Afzal featured the use of language models for XR in the project LUMINOUS
The coordinators took part in a panel discussion about the “Future of XR”, in which they could share their view about the next steps in XR research and development.
In addition, the AV group presented two application papers and one demonstrator, which attracted the interest of the conference participants
Dr. Jason Rambach, gave a talk on “Building Virtual Worlds with 3D Sensing and AI” at the NEM Summit 2024 in Brussels on the 23.10.2024. The presentation was part of the AI for Virtual Worlds session organized by Future Artificial Intelligence Research (FAIR). The presentation with results from the Project HumanTech and various XR projects based on object pose estimation technology from DFKI, was followed by an exciting panel discussion.
The HumanTech project, under the coordination of DFKI Augmented Vision – Dr. Jason Rambach, has reached another key milestone with a highly productive General Assembly Meeting held from 5 to 6 September 2024 at the Technological University of the Shannon (TUS), Athlone Campus, Ireland. As the project is on its final path toward completion next year, this meeting marked an important step in aligning strategies and objectives for the remaining phases.
The overall status of the project shows that everything is progressing as planned, with the pilots well on track and providing a solid foundation for both achieving the current project goals and supporting future research and development initiatives. Additionally, participants enjoyed a guided tour and live demonstration at TUS’s state-of-the-art robotics department, showcasing cutting-edge technology that will play a crucial role in advancing AI applications in the construction industry.
Dr. Jason Rambach, coordinator of the EU Horizon Project HumanTech , participated in the “Digital Twins for Sustainable Construction” session at the Sustainable Places conference in Luxembourg (23.9-27.9) organized by projects of the Tech4Construction cluster.
Dr. Rambach presented results from the Project HumanTech, focusing on the automated Scan-to-BIM problem. In addition, he was a panel member for the ensuing discussion together with coordinator and members of other ongoing projects in construction and building management such as RobetArme, Beeyonders, InCube and Reincarnate.
The Network of Excellence dAIEDGE held its General Assembly meeting on September 5th and 6th, looking back at the achievements of the last 12 months, and preparing the next steps of the network! It’s been two days full of inspiration and breakthroughs in Heraklion, Crete!
The 36 dAIEDGE partners gathered to share achievements and define the roadmap towards our big goal: To make Europe a world leader in AI and data economy!
During this event, we reinforced our strategic partnerships and strengthened our joint commitment to take technological innovation to another level.
A big thank to our partner ICS-FORTH for being exceptional hosts and making this assembly an unforgettable experience.
We continue to move forward together towards a bright future of innovation and growth!
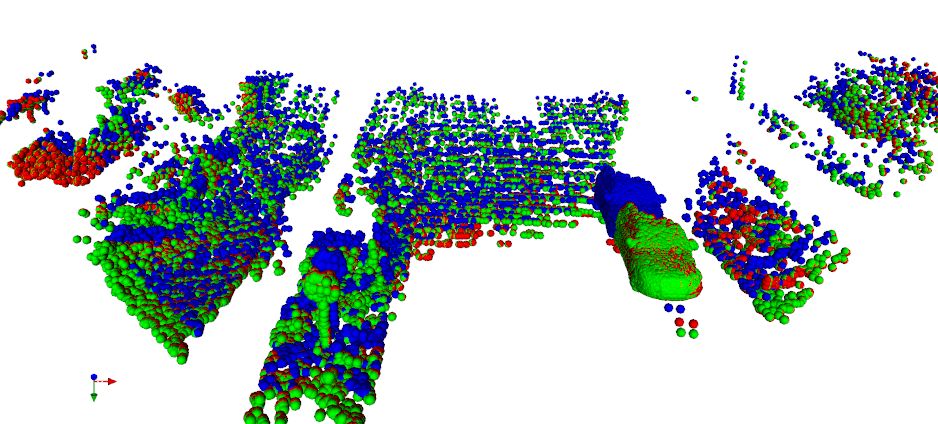
We are proud to announce that our paper “RMS-FlowNet++: Efficient and Robust Multi-scale Scene Flow Estimation for Large-Scale Point Clouds” by Ramy Battrawy, René Schuster, and Didier Stricker has been published in the International Journal of Computer Vision (IJCV). The online version of the paper can be found here a preprint is available here. The paper extends our previous work on efficient scene flow estimation in dense point clouds that has been published at ICRA 2022.
On the 18.6, the team presented their solution and results as part of the workshop program. Scan-to-BIM solutions are of great importance for the construction community as they automate the generation of as-built models of buildings from 3D scans, and can be used for quality monitoring, robotic task planning and XR visualization, among other applications.
We are excited to share that the Augmented Vision group got two papers accepted at the IEEE conference on Automatic Face and Gesture Recognition (FG 2024), the premier international forum for research in image and video-based face, gesture, and body movement recognition. FG 2024 took place in Istanbul, Turkey, from the 27th to 31st of May.
The 4th IEEE Workshop On AI Hardware: Test, Reliability And Security (AI-TREATS) held on May 23th and 24th 2024 was a great success!
The event, co-located with the 29th IEEE European Test Symposium, explored the recent advances in edge AI under the aspects of security, trust and testing. The workshop gathered many researchers with 15 presented papers, and a keynote by Prof. Yanjing Li (University of Chicago, USA).
On the opening day, Alain Pagani participated to a Panel Discussion about Networks of Excellence on Edge AI in Europe. Together with Mateo Sonza Reorda (Politecnico di Torino Italy, FAIR project) and Ovidiu Vermesan (SINTEF, Norway, EdgeAI project), he could present dAIEDGE and the main aspects of the Network of Excellence on Edge AI.
The workshop chaired by Annachiara Ruospo (Politecnico di Torino, Italy) and Haralampos Stratigopoulos (Sorbonne Universtié, France) was co-sponsored and co-organised by FAIR, dAIEDGE and EdgeAI
Dr. Jason Rambach, coordinator of the EU Horizon Project HumanTech , organized the 2nd workshop on “AI and Robotics in Construction” at the European Robotics Forum 2024 in Rimini, Italy (13.3-15.3) in cooperation with the construction Robotics projects Beeyonders and RobetArme and the Tech4Construction cluster.
The workshop included presentations on the current state of the 3 organizing projects (HumanTech, Beeyonders and RobetArme) from their coordinators, followed by technical presentations from project partners (KU Leuven, SINTEF, ITAINNOVA) on topics such as robotic vision and navigation and human-robot interaction for construction, and closing with a user evaluation insights presentation by the German Federal Institute for Occupational Safety and Health (BAUA). The presentations were followed by a very interesting round table discussion on the challenges of robotic projects in construction.
We are proud to announce that the researchers of the department Augmented Vision will present 6 papers at the upcoming CVPR conference taking place Mon Jun 17th through Fri Jun 21st, 2024 at the Seattle Convention Center, Seattle, USA.
The CVPR conference is the premier international conference in computer vision and pattern recognition.
HiPose: Hierarchical Binary Surface Encoding and Correspondence Pruning for RGB-D 6DoF Object Pose Estimation Yongliang Lin, Yongzhi Su, Praveen Nathan, Sandeep Inuganti, Yan Di, Martin Sundermeyer, Fabian Manhardt, Didier Stricker, Jason Rambach, Yu Zhang
SG-PGM: Partial Graph Matching Network with Semantic Geometric Fusion for 3D Scene Graph Alignment and Its Downstream Tasks Yaxu Xie, Alain Pagani, Didier Stricker
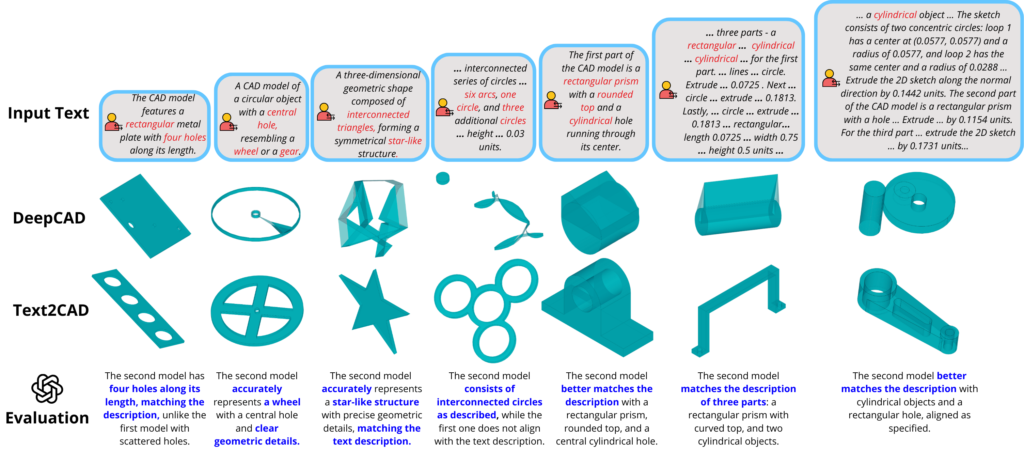
CAD-SIGNet: CAD Language Inference from Point Clouds using Layer-wise Sketch Instance Guided Attention Mohammad Sadil Khan, Elona Dupont, Sk Aziz Ali, Kseniya Cherenkova, Anis Kacem, Djamila Aouada
EventEgo3D: 3D Human Motion Capture from Egocentric Event Streams Christen Millerdurai, Hiroyasu Akada, Jian Wang, Diogo Luvizon, Christian Theobalt, Vladislav Golyanik
Congratulations to the authors for this great achievement!

























{kind=link}