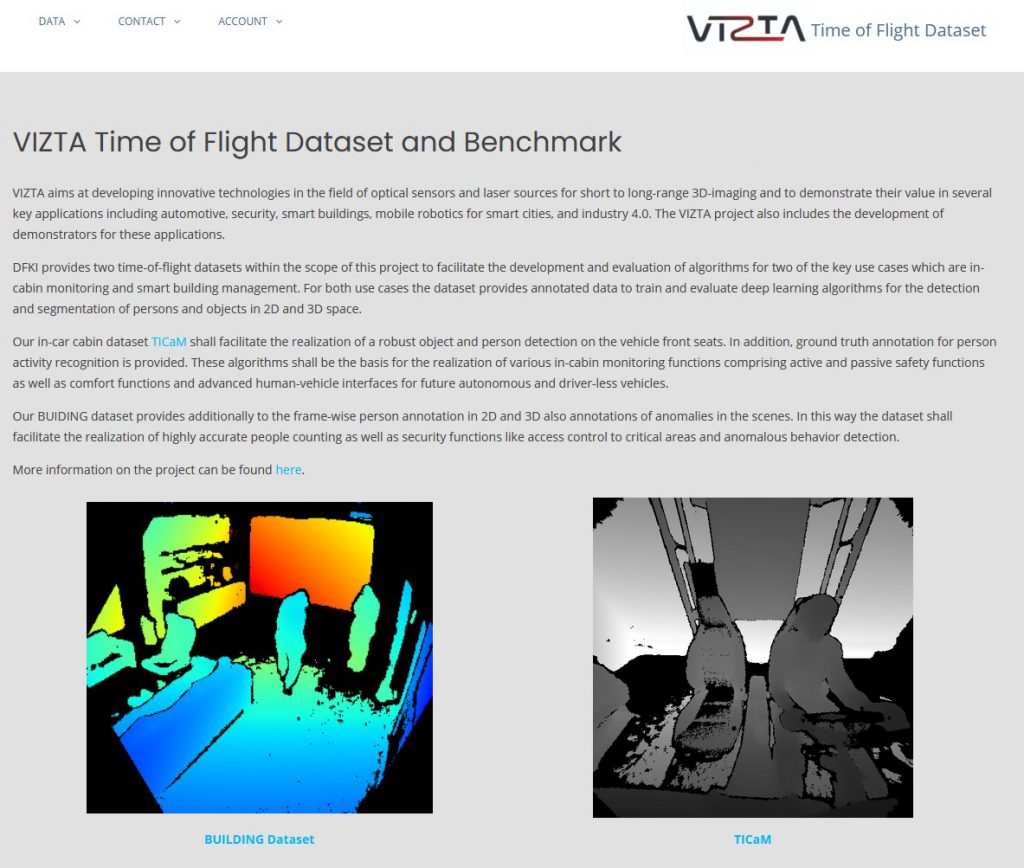
As part of the research activities of DFKI Augmented Vision in the VIZTA project (https://www.vizta-ecsel.eu/), we have published the open-source dataset for automotive in-cabin monitoring with a wide-angle time-of-flight depth sensor. The TiCAM dataset represents a variety of in-car person behavior scenarios and is annotated with 2D/3D bounding boxes, segmentation masks and person activity labels. The dataset is available here https://vizta-tof.kl.dfki.de/. The publication describing the dataset in detail is available as a preprint here: https://arxiv.org/pdf/2103.11719.pdf
Abstract: Instance segmentation of planar regions in indoor scenes benefits visual SLAM and other applications such as augmented reality (AR) where scene understanding is required. Existing methods built upon two-stage frameworks show satisfactory accuracy but are limited by low frame rates. In this work, we propose a real-time deep neural architecture that estimates piece-wise planar regions from a single RGB image. Our model employs a variant of a fast single-stage CNN architecture to segment plane instances. Considering the particularity of the target detected, we propose Fast Feature Non-maximum Suppression (FF-NMS) to reduce the suppression errors resulted from overlapping bounding boxes of planes. We also utilize a Residual Feature Augmentation module in the Feature Pyramid Network (FPN) . Our method achieves significantly higher frame-rates and comparable segmentation accuracy against two-stage methods. We automatically label over 70,000 images as ground truth from the Stanford 2D-3D-Semantics dataset. Moreover, we incorporate our method with a state-of-the-art planar SLAM and validate its benefits.
We are happy to announce that two of our papers have been accepted and published in the IEEE Access journal. IEEE Access is an award-winning, multidisciplinary, all-electronic archival journal, continuously presenting the results of original research or development across all of IEEE’s fields of interest. The articles are published with open access to all readers. The research is part of the BIONIC project and was funded by the European Commission under the Horizon 2020 Programme Grant Agreement n. 826304.
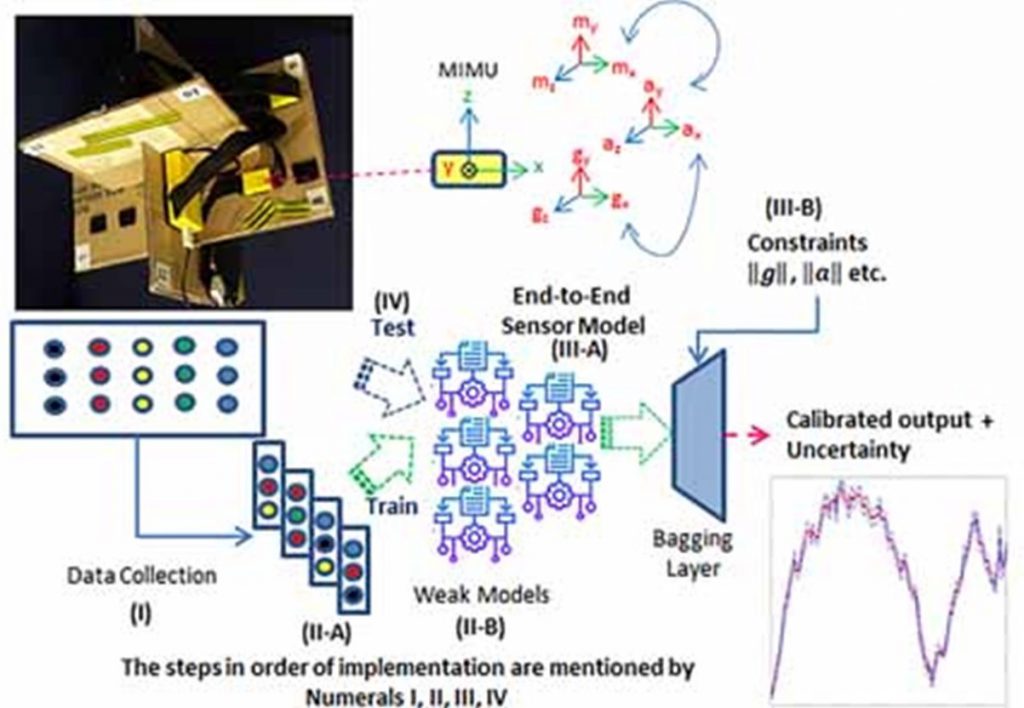
“Simultaneous End User Calibration of Multiple Magnetic Inertial Measurement Units With Associated Uncertainty” Published in: IEEE Access (Volume: 9) Page(s): 26468 – 26483 Date of Publication: 05 February 2021 Electronic ISSN: 2169-3536 DOI: 10.1109/ACCESS.2021.3057579
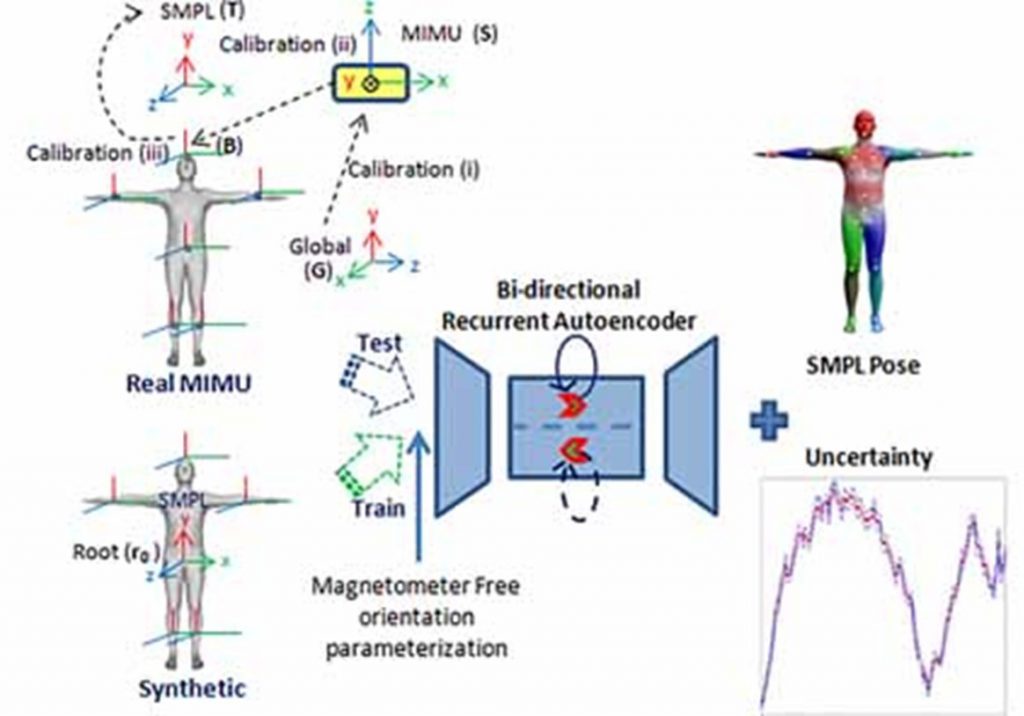
“Magnetometer Robust Deep Human Pose Regression With Uncertainty Prediction Using Sparse Body Worn Magnetic Inertial Measurement Units” Published in: IEEE Access (Volume: 9) Page(s): 36657 – 36673 Date of Publication: 26 February 2021 Electronic ISSN: 2169-3536 DOI: 10.1109/ACCESS.2021.3062545
On March 4th, 2021, Dr. Jason Rambach gave a talk on Machine Learning and Computer Vision at the GIZ (Deutsche Gesellschaft für Internationale Zusammenarbeit) workshop on Machine Learning and Computer Vision for Earth Observation organized by the DFKI MLT department. In the talk, the foundations of Computer Vision, Machine Learning and Deep Learning as well as current Research and Implementation challenges were presented.
Presentation by our senior researcher Dr. Jason RambachAgenda of the GIZ workshop on Machine Learning and Computer Vision for Earth Observation
DFKI participates in the VIZTA project, coordinated by ST Micrelectronics, aiming at developing innovative technologies in the field of optical sensors and laser sources for short to long-range 3D-imaging and to demonstrate their value in several key applications including automotive, security, smart buildings, mobile robotics for smart cities, and industry4.0. The 18-month public summary of the project was released, including updates from DFKI Augmented Vision on time-of-flight camera dataset recording and deep learning algorithm development for car in-cabin monitoring and smart building person counting and anomaly detection applications.
Please click here to check out the complete summary.
We are excited to announce that the Augmented Vision group will present 3 papers in the upcoming VISAPP 2021 Conference, February 8th-10th, 2021:
The International
Conference on Computer Vision Theory and Applications (VISAPP) is part of
VISIGRAPP, the 16th International Joint Conference on Computer Vision, Imaging
and Computer Graphics Theory and Applications. VISAPP aims at becoming a major
point of contact between researchers, engineers and practitioners on the area
of computer vision application systems. Homepage: http://www.visapp.visigrapp.org/
We are happy to announce
that our paper “SynPo-Net–Accurate and Fast
CNN-Based 6DoF Object Pose Estimation Using Synthetic Training” has been
accepted for publication at the MDPI Sensors journal, Special Issue Object
Tracking and Motion Analysis. Sensors (ISSN 1424-8220; CODEN: SENSC9)
is the leading international peer-reviewed open access journal on the science and technology of sensors.
Abstract: Estimation and
tracking of 6DoF poses of objects in images is a challenging problem of great
importance for robotic interaction and augmented reality. Recent approaches
applying deep neural networks for pose estimation have shown encouraging
results. However, most of them rely on training with real images of objects
with severe limitations concerning ground truth pose acquisition, full coverage
of possible poses, and training dataset scaling and generalization capability.
This paper presents a novel approach using a Convolutional Neural Network (CNN)
trained exclusively on single-channel Synthetic images of objects to regress
6DoF object Poses directly (SynPo-Net). The proposed SynPo-Net is a network
architecture specifically designed for pose regression and a proposed domain
adaptation scheme transforming real and synthetic images into an intermediate
domain that is better fit for establishing correspondences. The extensive
evaluation shows that our approach significantly outperforms the
state-of-the-art using synthetic training in terms of both accuracy and speed.
Our system can be used to estimate the 6DoF pose from a single frame, or be
integrated into a tracking system to provide the initial pose.
After two years of collaborative work, the project ArInfuse is inviting for its final workshop on January 28th.
ARinfuse is an Erasmus+ project that aims to infuse skills in Augmented Reality for geospatial information management in the context of utility underground infrastructures, such as water, sewage, electricity, gas and fiber optics. In this field, there is a real need for an accurate positioning of the underground utilities, to avoid damages to the existing infrastructures. Information communication technologies (ICT), in fusion with global navigation satellite systems (GNSS), GIS and geodatabases and augmented/virtual reality (AR/VR) are able to offer the possibility to convert the geospatial information of the underground utilities into a powerful tool for field workers, engineers and managers. ARinfuse is mainly addressed to technical professional profiles (future and current) in the utility sector that use, or are planning to use AR technology into practical applications of ordinary management and maintenance of utility networks.
The workshop entitled “Exploiting the potential of Augmented Reality & Geospatial Technologies within the utilities sector” is addressed to engineering students and professionals that are interested in the function, appliance and benefits of AR and geospatial technologies in the utilities sector.
The workshop will also introduce the ARinfuse catalogue of training modules on Augmented Reality and Geoinformatics applied within the utility infrastructure sector.