René Schuster and Prof. Dr. Didier Stricker moments after the oral defense.
On March 18th, 2022, René Schuster successfully defended his dissertation entitled “Data-driven and Sparse-to-Dense Concepts in Scene Flow Estimation for Automotive Applications”. The reviewers were Prof. Dr. Didier Stricker (Technical University of Kaiserslautern) and Prof. Dr. Andrés Bruhn (University of Stuttgart). Mr. Schuster received his doctorate from the Department of Computer Science at the Technical University of Kaiserslautern.
In his thesis, Mr. Schuster worked on three-dimensional motion estimation of the dynamic environment of vehicles. The focus was on machine learning methods, and the interpolation of individual estimates into a dense motion field. A particular challenge was the scarcity of annotated data for this problem and use case.
René Schuster received an M. Sc. in computational engineering from Darmstadt University of Technology in 2017. He then moved to DFKI to join the augmented reality group of Prof. Stricker. Much of his research was done in collaborative projects with BMW.
René Schuster at the celebration of his newly earned title.
Markus Miezal explains the core elements of the BIONIC system to Germany`s Chancellor Olaf Scholz
On March 18th, 2022, we had the great privilege to demonstrate the BIONIC system to the German chancelor Olaf Scholz during his visit to DFKI GmbH in Kaiserslautern. Dr. Markus Miezal was wearing the BIONIC system on a workstation and presented the real-time ergonomic assessment.
The system consists of work pants and a shirt, which carry inertial measurement units similar to those in a smartphone. Using sensor fusion methods, the body posture of the worker can be extracted to monitor the health of the worker and allows to give feedback, either direct, if the working posture is hazardous or via statistics gathered throughout a workday. Since privacy is a main topic of this project, the data is processed on a small wearable device, similar to a smartphone, so that the personal data literally stays on the person in the first place. Under premise of the workers approval, the data might be shared with his doctor, so that he can make recommendations on exercises according to this phyiscal stress during work. In a further step, the worker might even donate anonymized data to his employer, which allows him to analyze the general ergonomy of the workstation itself.
The chancellor was interested on how long and when to wear the system. Indeed, the system is not meant for every-day use but can be beneficial during training on a new workstation, where new work processes are learnt in an ergonomically sound way. Meanwhile the project has finished, however, spin-offs, e.g. the sci-track GmbH, will continue to provide the technology to the market.
For more information, please check out the following links:
We are happy to announce that the Augmented Vision group will present two papers in the upcoming CVPR 2022 Conference from June 19th-23rd in New Orleans, USA. The IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR) is the premier annual computer vision event internationally. Homepage: https://cvpr2022.thecvf.com/
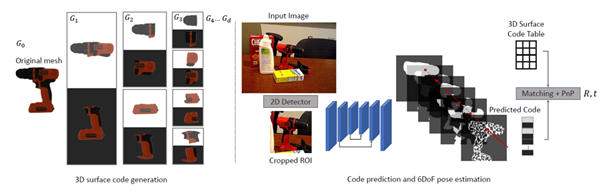
Summary: ZebraPose sets a new paradigm on model-based 6DoF object pose estimation by using a binary object surface encoding to train a neural network to predict the locations of model vertices in a coarse to fine manner. ZebraPose shows a major improvement over the state-of-the-art on several datasets of the BOP Object Pose Estimation benchmark.
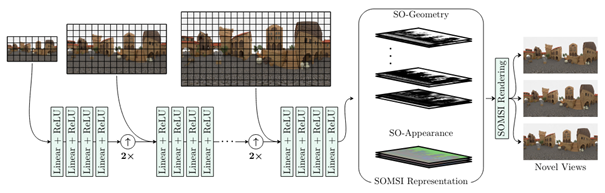
Summary: We propose a novel Multi-Sphere Image representation called Soft Occlusion MSI (SOMSI) and efficient rendering technique that produces accurate spherical novel-views from a sparse spherical light-field. SOMSI models appearance features in a smaller set (e.g. 3) of occlusion levels instead of larger number (e.g. 64) of MSI spheres. Experiments on both synthetic and real-world spherical light-fields demonstrate that using SOMSI can provide a good balance between accuracy and run-time. SOMSI view synthesis quality is on-par with state-of-the-art models like NeRF, while being 2 orders of magnitude faster.