On august 29th, 2025 Michael Lorenz successfully defended his doctoral thesis entitled “Tackling Challenges from Disturbed Magnetic Fields and Loose Sensor Attachments in Inertial Human Motion Capture”
The PhD thesis was carried out in the Augmented Vision department at DFKI, supervised by Prof. Dr. Didier Stricker.
The PhD examination commission consisted of Prof. Dr. Didier Stricker (RPTU), Prof. Karsten Berns (RPTU) and Prof. Thomas Seel (Uni Hannover).
The Science for AI workshop was held on 24 September 2025 as part of the ADRF2025 forum in Stavanger, Norway. Opened by Cecile Huet (European Commission) and moderated by Miguel Angel Rubio, the workshop brought together leading experts to discuss the future of European AI research infrastructures and the forthcoming RAISE (Resource for AI Science in Europe), a virtual institute aiming to align Europe’s compute, data, talent, and funding resources.
Panelists included Mario Fritz (CISPA Helmholtz Center for Information Security), Yiannis Kompatsiaris (Centre for Research & Technology Hellas), Jan Hajicč (Charles University), Sébastien Bratières (Translated), Sokratis Katsikas (Norwegian University of Science and Technology), Nicu Sebe (Università di Trento), and Dr. Alain Pagani, from DFKI Augmented Vision department. Representing DFKI and the European Network of Excellence dAIEDGE, Dr. Pagani emphasized the potential of distributed AI at the edge to deliver more sustainable AI solutions and reinforce Europe’s strategic position in the global AI landscape. The workshop highlighted how Science for AI can evolve into a cornerstone of Europe’s future research and innovation ecosystem
The Augmented Vision department presented 3 publications at the 33rd European Signal Processing Conference (EUSIPCO 2025), held in Isola delle Femmine – Palermo – Italy, on September 8-12, 2025.
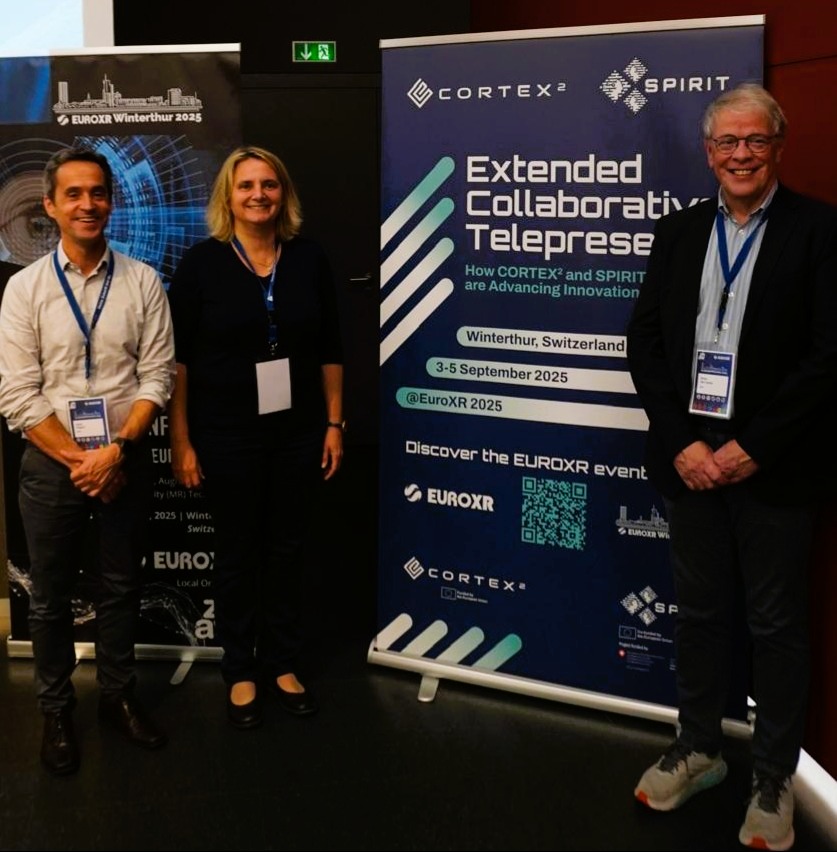
On 3–4 September 2025, the final event of the CORTEX² and SPIRIT projects took place as a special session of the EuroXR 2025 Conference in Winterthur, Switzerland. The session was co-chaired by Dr. Alain Pagani (DFKI) and Prof. Peter Van Daele (imec/Ghent University) and marked the culmination of more than three years of research and innovation on Extended Reality (XR) Collaborative Telepresence.
Over the course of two days, participants were able to explore the results of both projects through presentations, live demonstrations, and posters. More than 50 funded initiatives showcased their work, and the CORTEX² consortium presented three pilot use cases, including remote industrial collaboration, VR-based training, and immersive business meetings, in front of an audience of over 200 XR experts.
A particular focus of the event was the role of cascade funding under the European Commission’s Horizon Europe programme. This instrument enabled numerous small and ambitious projects to bring forward novel ideas and prototypes, demonstrating the vibrancy and creativity of Europe’s XR innovation ecosystem.
As coordinator of this large project, DFKI could position itself as a central actor in the XR community network, opening the way to new European initiatives around Virtual Worlds and Web 4.0.
A paper from DFKI Augmented Vision department was presented at the 11th Intelligent Systems Conference 2025 in Amsterdam, Netherlands that took place from Aug 28 – 29, 2025.
The project dAIEDGE co-organised the Edge AI Academy Summer School 2025, bringing together students, researchers, and industry experts for two days of intensive learning and exchange at the renowned Scuola Superiore Sant’Anna in Pisa. The event was co-organised by the EU-funded project dAIEDGE, alongside Chips JU EdgeAI, CLEVER, REBECCA, TRISTAN, NEUROKIT2E, SMARTY, and SMARTEDGE.
The summer school provided a hands-on, in-depth programme focused on key technologies and challenges in the rapidly evolving field of Edge Artificial Intelligence. Participants engaged in technical sessions covering RISC-V architectures, low-power AI hardware, and real-world deployment strategies for Edge AI systems. The programme encouraged dynamic interaction and fostered collaboration across disciplines and sectors.
Alain Pagani presented a course on “The intelligent edge – Navigating the frontiers of edge AI technology and applications”, together with Ovidiu Vermesan (SINTEF) and Giulio Urlini (ST Microelectronics).
The event not only provided practical training but also served as a platform to promote synergies among major European research initiatives in the Edge AI domain. The success of the summer school reflects a strong commitment to building a vibrant, connected, and forward-looking European Edge AI community.
The Directorate-General for Digital Services (DIGIT) of the European Commission invited the CORTEX2 project to participate in the VR Days 2025, an event organized by the Digital Innovation Lab to promote the adoption of emerging digital technologies within EU services.
Representing the project, Alain Pagani and Nareg Minaskan from DFKI presented CORTEX2’s remote telecooperation platform during two dedicated sessions: on June 17th in Brussels and June 26th in Luxembourg. The platform was featured through hands-on demonstrations of the industrial remote support pilot, enabling participants to experience immersive telecollaboration in action.
The demonstrations sparked strong interest among the audience, particularly regarding the practical application of immersive technologies and extended reality (XR) in professional environments. The event highlighted the growing potential of XR solutions to enhance remote support and collaboration in industry and public services.
On June 13th, the project CORTEX2 was presented at Viva Technology 2025, during the European Health and Digital Executive Agency (HaDEA) workshop on EU funding for digital technologies.
In this workshop, available funding opportunities for research and innovation in the digital field were presented by Marina Zanchi, Director of HaDE and Jean-François Junger, Deputy Head of Unit at HaDEA, and successful projects were showcased.
For CORTEX2, the coordinator Alain Pagani could highlight the immersive XR-based tools supporting remote collaboration across various sectors, including healthcare, education, business, and industry.
SPADE stands for Secure, Privacy-Aware Naturalistic Driving Data for Future Mobility Insights from Structured and Unstructured Environments. The workshop had a full-day schedule consisting of invited talks and submitted papers, all with thematic relation to the BERTHA EU Horizon Project.
The Augmented Vision department had a strong presence at the IEEE Computer Vision and Pattern Recognition CVPR 2025 conference with contributions to the main conference, workshops, and challenges:
Dr. Jason Rambach, was honored as an Outstanding Reviewer of the CVPR 2025 conference, selected among the top 5% of the 9872 total reviewers.
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR) is the premier annual computer vision event. CVPR 2025 will be held in Nashville, TN, from June 11th to June 15th 2025.
The complete list of outstanding reviewers for this year can be accessed HERE.
René Schuster gave a talk on “Visual Continual Learning – Beyond Current Incremental Settings” during the 2nd Workshop on Human-Centered Vision and Media Technologies (HCVM) on 23.05.2025 in Tokyo. The workshop was part of the ASPIRE program (Adopting Sustainable Partnerships for Innovative Research Ecosystem) of the Japanese Science and Technology Agency.
On May 9th, 2025 Lukas Stäcker successfully defended his doctoral thesis entitled “Radar-Camera Fusion with Deep Neural Networks for Automotive Object Detection”. The PhD thesis was carried out in the Augmented Vision department at DFKI, supervised by Prof. Didier Stricker and Dr. Jason Rambach, in collaboration with Stellantis.
The PhD examination commission consisted of Prof. Dr. Didier Stricker (RPTU), and Prof. Christoph Stiller (KIT)) and was chaired by Prof. Nicolas Gauger (RPTU).
Congratulations on your PhD and we wish you all the best for the future!
On February 24th, 2025 Pramod Murthy successfully defended his doctoral thesis entitled “Monocular Visual Human Pose Parameter Estimation under Partial Observations”.
The PhD thesis was carried out in the Augmented Vision department at DFKI, supervised by Prof. Dr. Didier Stricker.
The PhD examination commission consisted of Prof. Dr. Didier Stricker (RPTU), Prof. Karsten Berns and was chaired by Prof. Nicolas Gauger.
A great big congratulations on receiving your PhD and we wish you all the best for the future!
On April 11th, 2025 Tewodros Amberbir Habtegebrial successfully defended his doctoral thesis entitled “Learning View Synthesis from Minimal Scene Specifications”.
The PhD thesis was carried out in the Augmented Vision department at DFKI, supervised by Prof. Didier Stricker.
The PhD examination commission consisted of Prof. Dr. Didier Stricker (RPTU), Prof. Yiorgos Chrysanthou, and was chaired by Prof. Grimm (RPTU).
Congratulations on your PhD and we wish you all the best for the future!
Our paper “Spatio-Temporal Diffusion Model for Satellite Imagery” received the Best Paper Award at the Eleventh International Conference on Remote Sensing and Geoinformation of Environment (RSCy 2025).
Starting from sparse satellite observations, our method predicts how landscapes might evolve in the future with changes such as urban expansions or deforested regions, by leveraging a Diffusion Transformer with temporal layers. By training on open-source Landsat and Sentinel-2 data, the model generates future scenarios from a single reference image and a specified target year. This approach provides powerful insights into environmental changes, supporting both climate impact assessments and resource management.
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) provides a forum for computer vision researchers working on practical applications and innovative algorithms to share their latest developments. WACV 2025 was held in Tucson, Arizona, from February 28th to March 4th.
The researchers of the Augmented Vision department have presented 4 papers at the ICPRAM 2025 conference taking place Feb 23 – 25, 2025 in Porto, Portugal.
The International Conference on Pattern Recognition Applications and Methods (ICPRAM) is a point of contact between researchers and engineers working on Pattern Recognition, both from a theoretical and application perspective.
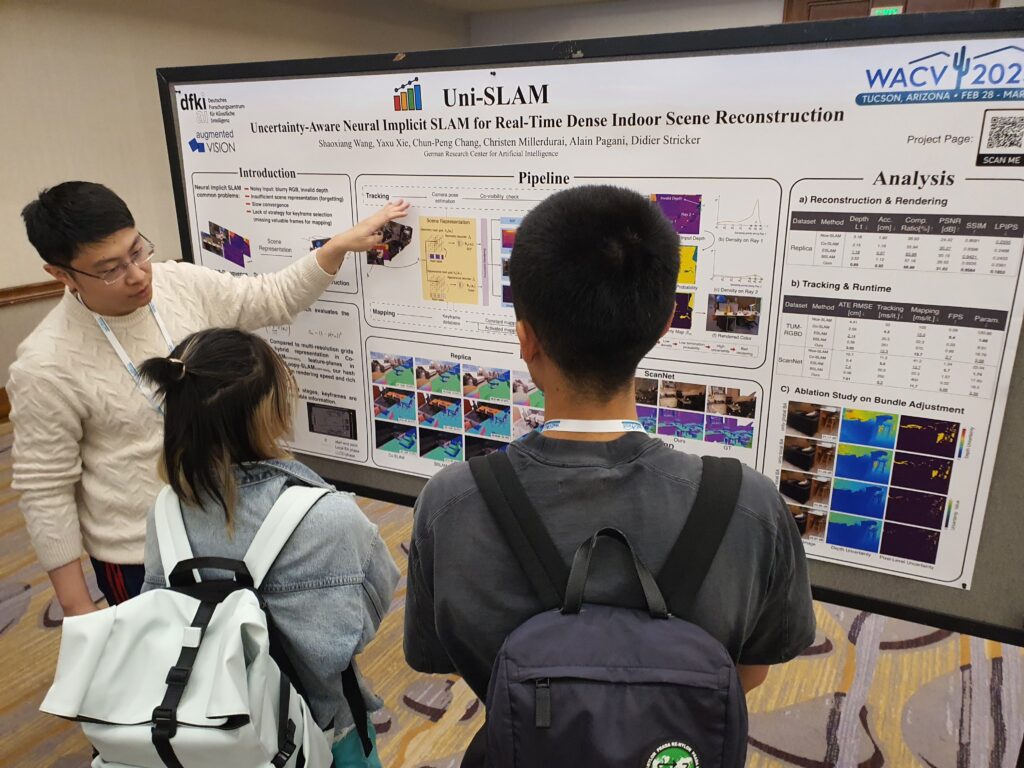
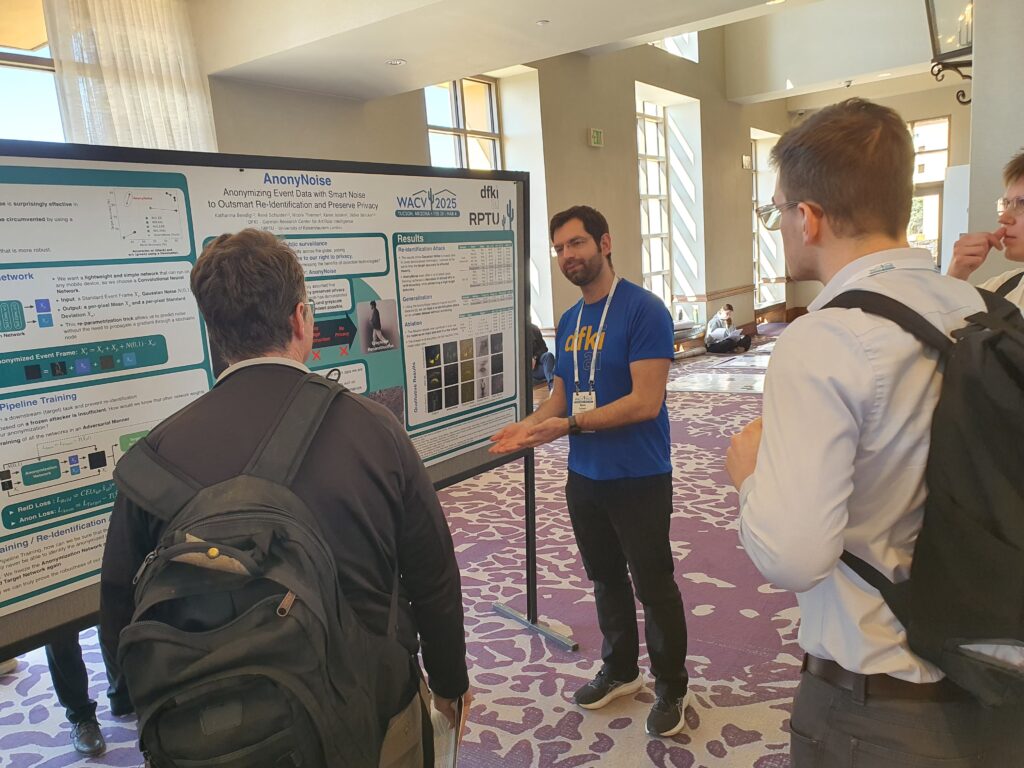
The researchers of the department Augmented Vision have presented 4 papers at WACV 2025 conference taking place Feb 28 – Mar 4, 2025 in Tucson, Arizona, USA.
The IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) one of the three major Computer Vision conferences organized by TCPAMI.
“AnonyNoise: Anonymizing Event Data with Smart Noise to Outsmart Re-Identification and Preserve Privacy”, Katharina Bendig, René Schuster, Nicole Thiemer, Karen Joisten, Didier Stricker
The consortium of the HumanTech project, under the coordination of DFKI Augmented Vision – Dr. Jason Rambach, had its final in-person General Assembly meeting in Madrid, Spain on the 30-31st January 2025. The meeting was hosted in the premises of the project partner ACCIONA. All project partners had an opportunity to experience live demonstrations of the HumanTech technologies bringing AI and Robots to construction sites, such as intention-activated exoskeletons for construction workers and collaborative brick-laying robots.
The HumanTech project is ending in May 2025 with several success stories such as:
5 innovative pilot deployments of HumanTech technologies.
15+ scientific publications including top computer vision and robotics journals and conferences.
5 awards for DFKI in International challenges in object pose estimation and Scan-to-BIM.
Building a vibrant community for AI in Construction, the Tech4Construction cluster.