The kick-off meeting of the CORTEX² project has been held at DFKI in Kaiserslautern on September 20th, 2022.

The mission of CORTEX² “COoperative Real-Time EXperiences with EXtended reality” is to democratize access to the remote collaboration offered by next-generation XR experiences across a wide range of industries and SMEs.
CORTEX2 will provide:
- Full support for AR experience as an extension of video conferencing systems when using heterogeneous service end devices through a novel Mediation Gateway platform.
- Resource-efficient teleconferencing tools through innovative transmission methods and automatic summarization of shared long documents.
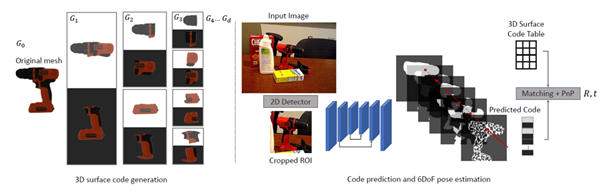
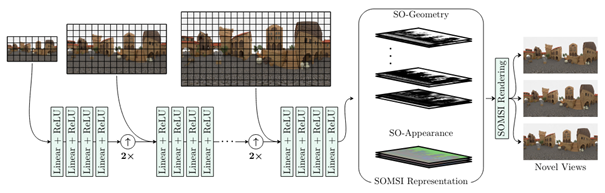
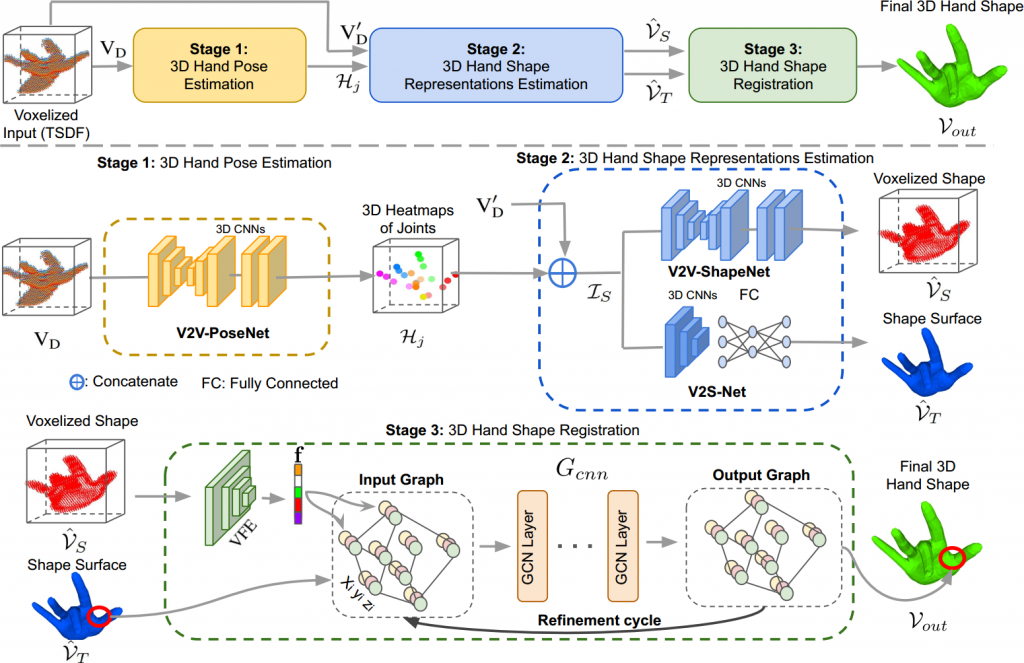
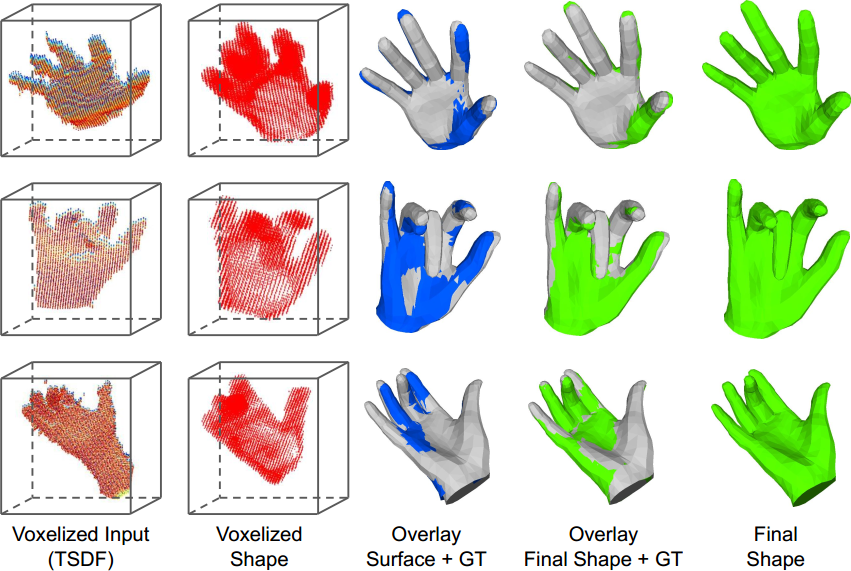
- Easy-to-use and powerful XR experiences with instant 3D reconstruction of environments and objects, and simplified use of natural gestures in collaborative meetings.
- Fusion of vision and audio for multichannel semantic interpretation and enhanced tools such as virtual conversational agents and automatic meeting summarization.
- Full integration of internet of things (IoT) devices into XR experiences to optimize interaction with running systems and processes.
- Optimal extension possibilities and broad adoption by delivering the core system with open APIs and launching open calls to enable further technical extensions, more comprehensive use cases, and deeper evaluation and assessment.
Partners of the project are:
- DFKI – Deutsches Forschungszentrum für Künstliche Intelligenz GmbH Germany
- LINAGORA – France
- ALE – Alcatel-Lucent Entreprise International France
- ICOM – Intracom SA Telecom Solutions Greece
- AUS – AUSTRALO Alpha Lab MTÜ Estonia
- F6S – F6S Network Limited Ireland
- KUL– Katholieke Universiteit Leuven Belgium
- CEA – Commissariat à l’énergie atomique et aux énergies alternatives France
- ACT – Actimage GmbH Germany
- UJI – Universitat Jaume I De Castellon
In addition to the project activities, CORTEX² will invest a total of 4 million Euros in two open calls, which will be aimed at recruiting tech startups/SMEs to co-develop CORTEX2; engaging new use-cases from different domains to demonstrate CORTEX2 replication through specific integration paths; assessing and validating the social impact associated with XR technology adoption in internal and external use cases.
Contact: Dr. Alain Pagani (Coordinator)