We are happy to announce that our paper
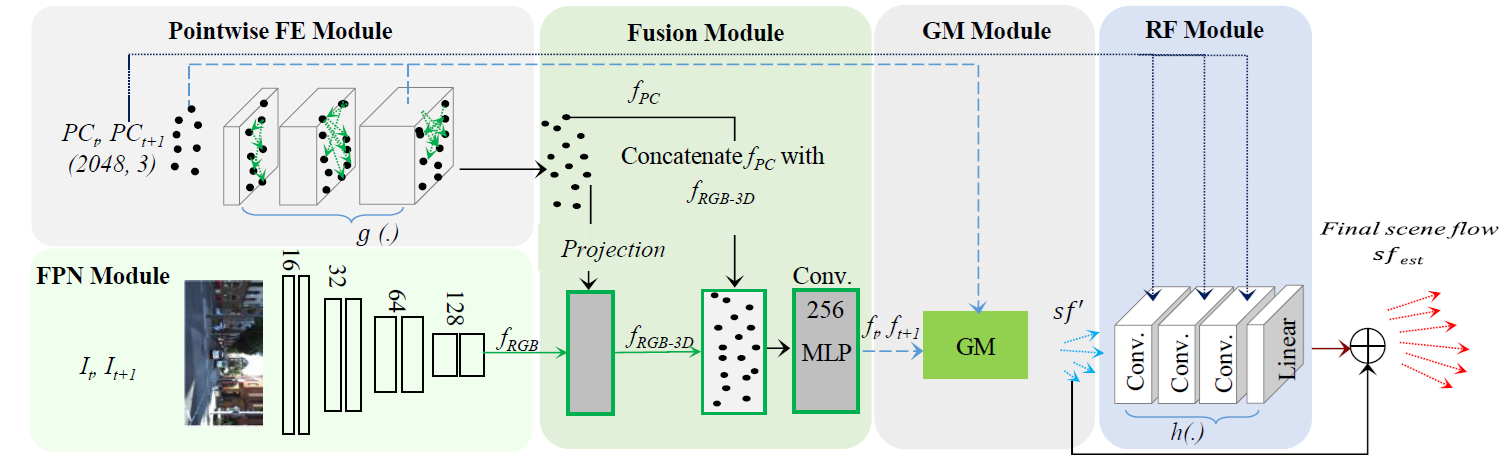
SF3D-RGB: Scene Flow Estimation from Monocular Camera and Sparse LiDAR
by Rajai Alhimdiat, Ramy Battrawy, René Schuster, Didier Stricker, and Wesam Ashour,
has been accepted to the Computer Vision Conference 2026, organized by the Science and Information Organization. The conference will take place in Amsterdam from from May 21st to 22nd, 2026.