![]()
LBS & Augmented Reality Assistive System for Utilities Infrastructure Management through Galileo and EGNOS
LARA is a European Project aiming at developing a new mobile device for helping employees of utilities companies in their work on the field. The device to be developed – called the LARA System – consists of a tactile tablet and a set of sensors that can geolocalise the device using the European GALILEO system and EGNOS capabilities.
The LARA system is produced under a collaborative work where different players, SMEs, large companies, universities and research institutes are contributing with different expertise.
The LARA system is a mobile device for utility field workers. In practice, this device will guide the field workers in underground utilities to ‘see’ what is happening underworld, like an “x-ray image” of the underground infrastructure. The system is using Augmented Reality interfaces to render the complex 3D models of the underground utilities infrastructure such as water, gas, electricity, etc. in an approach that is easily understandable and useful during field work.
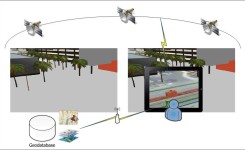
The 3D information is acquired from existing 3D GIS geodatabases. To this aim, the hand-held device integrates different technologies such as: positioning and sensors (GNSS), Augmented Reality (AR), GIS, geodatabases, etc.
Typical scenario
The end user is a technician working in public or private company operating an underground network in the utilities sector (electricity, gas, water or sewage). His role in the company is to plan interventions on the network such as repairs and control and execute the planned operations on site with his team.
The typical scenario of the usage of the LARA system is divided into several steps:
- Preparation. The end user prepares and plans an intervention while sitting in his office. He can see the pipes installation by using a web application that approximately shows the pipes over a map of the area. He can download information onto his LARA Device.
- On-Field coarse localization. On the day of intervention on site, the user drives to the global area of intervention (typical size of the area: city block). The user is then guided by the LARA system to find the position of the operation as follows: The user starts the application and selects 2D view then a map is shown on the interface with the user location pointing it on the map.
- Surveying (precise localization). When the user is near enough from the exact position of intervention, he can switch to 3D/AR mode where the application shows the real images (from the camera), displaying also the pipes as overlay (Augmented Reality). The Information of the pipes is structured in layers, so the user can choose between different information levels (water pipes, electrical wires…).
- Field work (excavation, repair…). The user can precisely define the corners of the excavation to be done on the street. He marks them with paint. The workers start to excavate. They have information about which other utilities they will find on the way.
- Onsite updates. If the user discovers that some information about the localization of the pipes is wrong, he can suggest an update by providing the actual position.
- Backoffice updates. Back to his office, the user connects the LARA system to a server, where the updates are pushed to a queue for verification before integrating them in the network’s databases.
Partners
The project LARA is a common project with 9 partners from research and industry and is financed by the program Horizon 2020. Project partners are: GeoImaging Ltd (Cyprus), Aristotle University of Thessaloniki (Greece), Igenieria Y Soluciones Informaticas des Sur S.L. (Spain), SignalGenerix Ltd (Cyprus), Municipality of Kozani (DEYAK, Greece), Birmingham City Council (UK), Hewlett Packard Espanola S.L. (Spain), University Malaysia Sarawak (Malaysia)
Funding by: EU
- Grant agreement no.: 641460
- Funding programm: H2020
- Begin: 01.02.2015
- End: 30.06.2017