René Schuster and Prof. Dr. Didier Stricker moments after the oral defense.
On March 18th, 2022, René Schuster successfully defended his dissertation entitled “Data-driven and Sparse-to-Dense Concepts in Scene Flow Estimation for Automotive Applications”. The reviewers were Prof. Dr. Didier Stricker (Technical University of Kaiserslautern) and Prof. Dr. Andrés Bruhn (University of Stuttgart). Mr. Schuster received his doctorate from the Department of Computer Science at the Technical University of Kaiserslautern.
In his thesis, Mr. Schuster worked on three-dimensional motion estimation of the dynamic environment of vehicles. The focus was on machine learning methods, and the interpolation of individual estimates into a dense motion field. A particular challenge was the scarcity of annotated data for this problem and use case.
René Schuster received an M. Sc. in computational engineering from Darmstadt University of Technology in 2017. He then moved to DFKI to join the augmented reality group of Prof. Stricker. Much of his research was done in collaborative projects with BMW.
René Schuster at the celebration of his newly earned title.
Markus Miezal explains the core elements of the BIONIC system to Germany`s Chancellor Olaf Scholz
On March 18th, 2022, we had the great privilege to demonstrate the BIONIC system to the German chancelor Olaf Scholz during his visit to DFKI GmbH in Kaiserslautern. Dr. Markus Miezal was wearing the BIONIC system on a workstation and presented the real-time ergonomic assessment.
The system consists of work pants and a shirt, which carry inertial measurement units similar to those in a smartphone. Using sensor fusion methods, the body posture of the worker can be extracted to monitor the health of the worker and allows to give feedback, either direct, if the working posture is hazardous or via statistics gathered throughout a workday. Since privacy is a main topic of this project, the data is processed on a small wearable device, similar to a smartphone, so that the personal data literally stays on the person in the first place. Under premise of the workers approval, the data might be shared with his doctor, so that he can make recommendations on exercises according to this phyiscal stress during work. In a further step, the worker might even donate anonymized data to his employer, which allows him to analyze the general ergonomy of the workstation itself.
The chancellor was interested on how long and when to wear the system. Indeed, the system is not meant for every-day use but can be beneficial during training on a new workstation, where new work processes are learnt in an ergonomically sound way. Meanwhile the project has finished, however, spin-offs, e.g. the sci-track GmbH, will continue to provide the technology to the market.
For more information, please check out the following links:
We are happy to announce that the Augmented Vision group will present two papers in the upcoming CVPR 2022 Conference from June 19th-23rd in New Orleans, USA. The IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR) is the premier annual computer vision event internationally. Homepage: https://cvpr2022.thecvf.com/
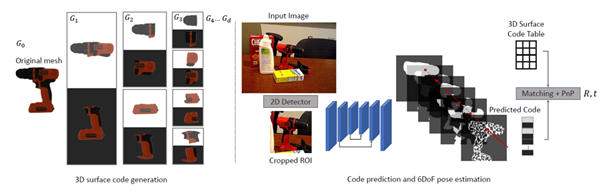
Summary: ZebraPose sets a new paradigm on model-based 6DoF object pose estimation by using a binary object surface encoding to train a neural network to predict the locations of model vertices in a coarse to fine manner. ZebraPose shows a major improvement over the state-of-the-art on several datasets of the BOP Object Pose Estimation benchmark.
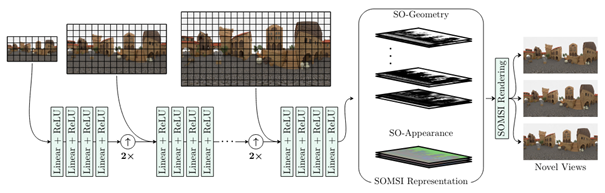
Summary: We propose a novel Multi-Sphere Image representation called Soft Occlusion MSI (SOMSI) and efficient rendering technique that produces accurate spherical novel-views from a sparse spherical light-field. SOMSI models appearance features in a smaller set (e.g. 3) of occlusion levels instead of larger number (e.g. 64) of MSI spheres. Experiments on both synthetic and real-world spherical light-fields demonstrate that using SOMSI can provide a good balance between accuracy and run-time. SOMSI view synthesis quality is on-par with state-of-the-art models like NeRF, while being 2 orders of magnitude faster.
We are happy to announce that our project DECODE has been accepted for the Nvidia Academic Hardware Grant. Nvidia will support our research in the field of human motion estimation and semantic reconstruction by donating a Nvidia A100 GPU for data centers. We will use the new hardware to accelerate our experiments for continual learning.
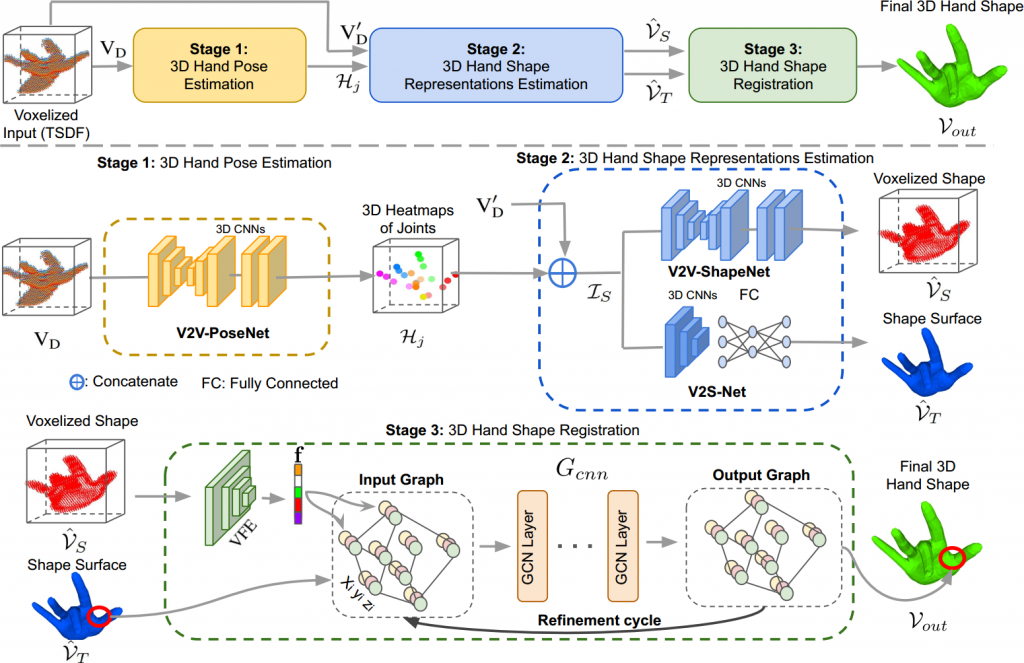
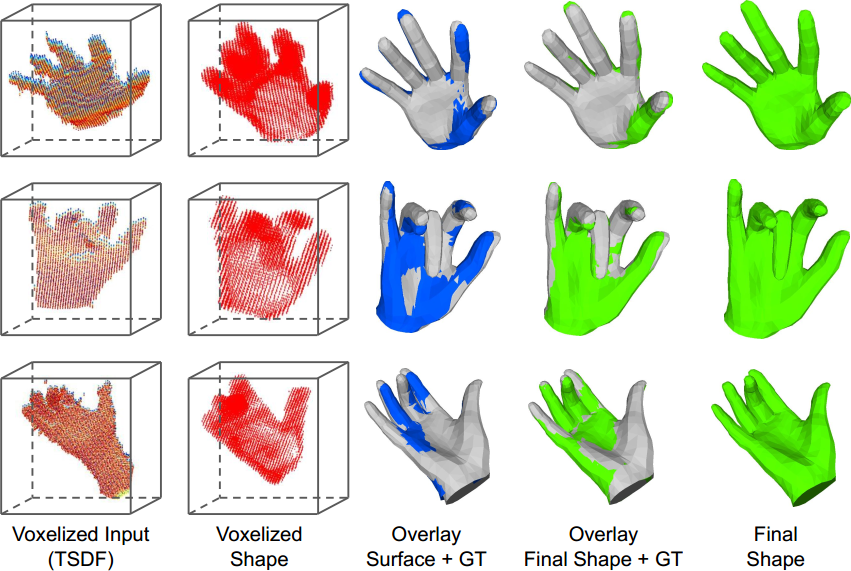
We introduce a new HandVoxNet++ method for 3D hand shape and pose reconstruction from a single depth map, which establishes an effective inter-link between hand pose and shape estimations using 3D and graph convolutions. The input to our network (i.e., HandVoxNet++) is a 3D voxelized depth map based on the truncated signed distance function (TSDF), and it relies two hand shape representations. The first one is the 3D voxelized grid of hand shape, which does not preserve the mesh topology and which is the most accurate representation. The second representation is the hand surface that preserves the mesh topology. We combine the advantages of both representations by aligning the hand surface to the voxelized hand shape either with a new neural Graph-Convolutions-based Mesh Registration (GCN-MeshReg) or classical segment-wise Non-Rigid Gravitational Approach (NRGA++) which does not rely on training data. In this journal extension of our previous approach presented at CVPR 2020, we gain 41.09% and 13.7% higher shape alignment accuracy on SynHand5M and HANDS19 datasets, respectively. Our results indicate that the one-to-one mapping between voxelized depth map, voxelized shape and 3D heatmaps of joints is essential for an accurate hand shape and pose recovery.
We are happy to announce that the Augmented Vision group will present 2 papers in the upcoming BMVC 2021 Conference, 22-25 November, 2021:
The British Machine Vision Conference (BMVC) is the British Machine Vision Association (BMVA) annual conference on machine vision, image processing, and pattern recognition. It is one of the major international conferences on computer vision and related areas held in the UK. With increasing popularity and quality, it has established itself as a prestigious event on the vision calendar. Homepage: https://www.bmvc2021.com/
Summary: TICaM is a Time-of-flight In-car Cabin Monitoring dataset for vehicle interior monitoring using a single wide-angle depth camera. The dataset goes beyond currently available in-car cabin datasets in terms of the ambit of labeled classes, recorded scenarios and annotations provided; all at the same time. The dataset is available here: https://vizta-tof.kl.dfki.de/
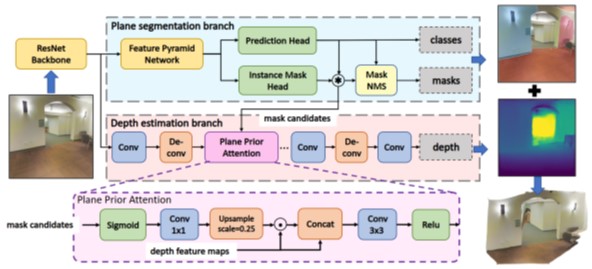
Summary: Piece-wise 3D planar reconstruction provides holistic scene understanding of man-made environments, especially for indoor scenarios. Different from other existing approaches, we start from enforcing cross-task consistency for our multi-task convolutional neural network, PlaneRecNet, which integrates a single-stage instance segmentation network for piece-wise planar segmentation and a depth decoder to reconstruct the scene from a single RGB image.
We are happy to announce that our paper “Multi-scale Iterative Residuals for Fast and Scalable Stereo Matching” has been accepted to the CSCS 2021!
The Computer Science in Cars Symposium (CSCS) is ACM’s flagship event in the field of Car IT. The goal is to bring together scientists, engineers, business representatives, and anyone who shares a passion for solving the myriad of complex problems in vehicle technology and their application to automation, driver and vehicle safety, and driving system safety.
In our work, we place stereo matching in a coarse-to-fine estimation framework to improve runtime and memory requirements while maintaining accuracy. This multiscale framework is tested for two state-of-the-art stereo networks and shows significant improvements in runtime, computational complexity, and memory requirements.
KI zur Erkennung menschlicher Bewegungen und des Umfeldes
Adaptive Methoden die kontinuierlich dazu lernen (Lebenslanges Lernen), bilden eine zentrale Herausforderung zur Entwicklung von robusten, realitätsnahen KI-Anwendungen. Neben der reichen Historie auf dem Gebiet des allgemeinen kontinuierlichen Lernens („Continual Learning“) hat auch das Themenfeld von kontinuierlichem Lernen für Machinelles Sehen unter Realbedingungen jüngst an Interesse gewonnen.
Ziel des Projektes DECODE ist die Erforschung von kontinuierlich adaptierfähigen Modellen zur Rekonstruktion und dem Verständnis von menschlicher Bewegung und des Umfeldes in anwendungsbezogenen Umgebungen. Dazu sollen mobile, visuelle und inertiale Sensoren (Beschleunigungs- und Drehratensensoren) verwendet werden. Für diese verschiedenen Typen an Sensoren und Daten sollen unterschiedliche Ansätze aus dem Bereich des Continual Learnings erforscht und entwickelt werden um einen problemlosen Transfer von Laborbedingungen zu alltäglichen, realistischen Szenarien zu gewährleisten. Dabei konzentrieren sich die Arbeiten auf die Verbesserung in den Bereichen der semantischen Segmentierung von Bildern und Videos, der Schätzung von Kinematik und Pose des menschlichen Körpers sowie der Repräsentation von Bewegungen und deren Kontext. Das Feld potentieller Anwendungsgebiete für die in DECODE entwickelten Methoden ist weitreichend und umfasst eine detaillierte ergonomische Analyse von Mensch-Maschine Interaktionen zum Beispiel am Arbeitsplatz, in Fabriken, oder in Fahrzeugen.
Mr. Habtegebrial is a PhD student at the Augmented Vision research department at the German Research Center for Artificial Intelligence (DFKI) and at the same named lab at the Technical University of Kaiserslautern (TUK). He was awarded the Google PhD Fellowship for his exceptional and innovative research in the field of “Machine Perception“. The PhD fellowship is endowed with 80,000 US dollars. Google also provides each of the PhD students with a research mentor.
Professor Didier Stricker, Tewodros’ PhD supervisor and head of the respective research areas at TUK and DFKI on the award for his PhD student: “I am very pleased that Tewodros received a PhD Fellowship from Google. He earned the honor through his outstanding achievements in his research work in Machine Perception and Image Synthesis.”
As part of his PhD studies Mr Habtegebrial has been working on Image-Based Rendering (IBR). Recently, he has worked on a technique that enables Neural Networks to render realistic novel views, given a single 2D semantic map of the scene. The approach has been published together with google and Nvidia at the pemium conference Neurips 2020. In collaboration with researchers at DFKI and Google research, he is working on spherical light-field interpolation and realistic modelling of reflective surfaces in IBR. This enables the implementation of new applications in the field of realistic virtual reality (VR) and telepresence. In addition to his PhD, topic he has co-authored several articles on Optical Character Recognition (OCR) for Amharic language, which is the official language of Ethiopia.
Hitachi and DFKI have been collaborating on various research projects for many years. Hitachi is now presenting joint current research with DFKI, the AG wearHEALTH at the Technical University of Kaiserslautern (TUK), Xenoma Inc. and sci-track GmbH, a joint spin-off of DFKI and TUK, in the field of occupational safety in a video.
The partners have jointly developed wearable AI technology that supports the monitoring of workers’ physical workload, the capturing of workflows and can be used to optimize them in terms of efficiency, occupational safety and health. Sensors are loosely integrated into normal working clothes to measure the pose and movements of the body segments. A new approach to handle cloth induced artefakts allows full wearing comfort and high capturing accuracy and reliability.
Hitachi and DFKI will use the new solution to support worker and prevent dangerous poses to create a more efficient and safe working environment, while supporting full wearing comfort of any clothes.
Hitachi is a Principal Partner of the 2021 UN Climate Change Conference, known internationally as COP26, where it will present a video of its joint collaboration with DFKI, among other projects.
Hitachi, Ltd. (TSE: 6501), headquartered in Tokyo, Japan, is contributed to a sustainable society with a higher quality of life by driving innovation through data and technology as the Social Innovation Business. Hitachi is focused on strengthening its contribution to the Environment, the Resilience of business and social infrastructure as well as comprehensive programs to enhance Security & Safety. Hitachi resolves the issues faced by customers and society across six domains: IT, Energy, Mobility, Industry, Smart Life and Automotive Systems through its proprietary Lumada solutions. The company’s consolidated revenues for fiscal year 2020 (ended March 31, 2021) totaled 8,729.1 billion yen ($78.6 billion), with 871 consolidated subsidiaries and approximately 350,000 employees worldwide. Hitachi is a Principal Partner of COP26, playing a leading role in the efforts to achieve a Net Zero society and become a climate change innovator. Hitachi strives to achieve carbon neutrality at all its business sites by fiscal year 2030 and across the company’s entire value chain by fiscal year 2050. For more information on Hitachi, please visit the company’s website at https://www.hitachi.com.








{kind=link}